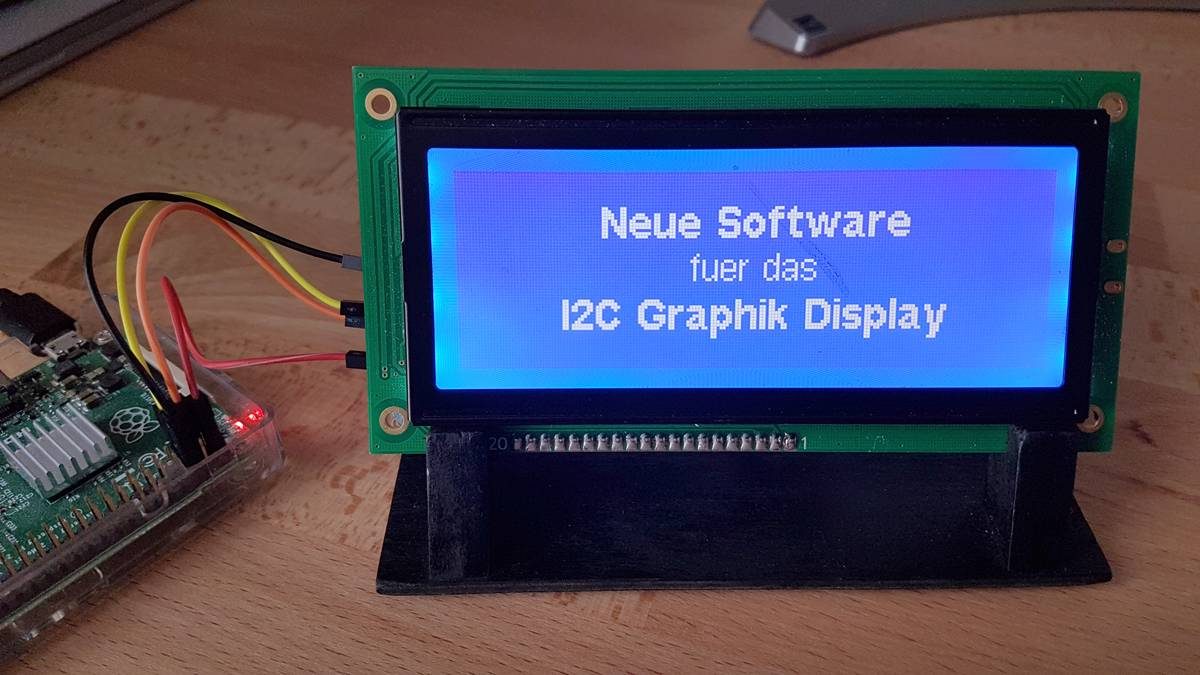
Das Graphik-Display „Smart I2C-GLCD“ hat inzwischen eine ganze Reihe Anwendungsgebiete gefunden. Dabei sind einige neue Funktionen hinzugekommen, z.B. das Zeichnen von gepunkteten Linien oder die Ausgabe von negativen Zahlen. Durch den größeren Funktionsumfang war der Instruktions-Interpreter aber nicht mehr effizient und musste verbessert werden.
Zur Erinnerung: Das Graphik-Display empfängt Instruktionen über das I2C-Interface. Das erste Byte jeder Datensendung ist das Command-Token und bestimmt, welche Funktion ausgeführt werden soll. Z.B steht 17 für das Zeichnen einer Linie oder 32 für die Ausgabe eines Zeichens. Im bisherigen Programm gab es eine Switch/Case-Konstruktion, die sich durch die Liste der möglichen Instruktion-Tokens hindurch hangelte, bis der passende Token gefunden wurde. Dort wurde dann in die entsprechende Graphik-Funktion verzweigt. Das funktionierte gut mit 5 oder 10 möglichen Tokens, macht aber keinen Sinn mehr für die derzeitige Liste von über 30.
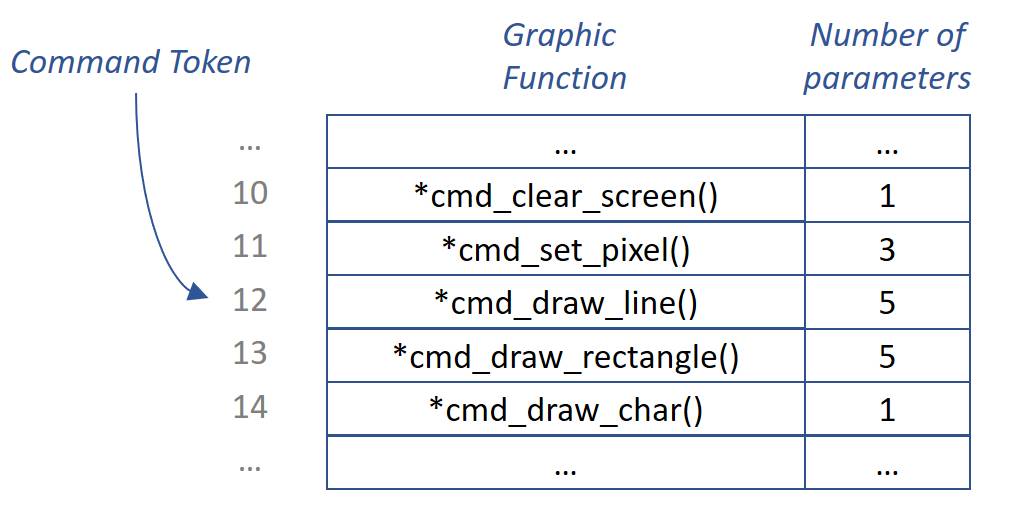
Wie geht es besser? Die Idee ist ganz einfach: Eine Tabelle, die für jeden Token einen Zeiger auf die zugehörige Graphik-Funktion. Mit Hilfe dieser Tabelle kann der Instruktions-Token als Index genutzt werden, um ohne Schleifen direkt den jeweiligen Tabellen-Eintrag zu finden.
Allerdings benötigt der Instruktionsinterpreter nicht nur den Zeiger auf die zugehörige Funktion, sondern auch die Anzahl der Parameter, die zum Ausführen der Funktion benötigt werden. Die Graphik-Funktion draw_char() braucht nur einen Parameter, eben das zu zeichnende Zeichen, während die Funktion draw_line() 5 Parameter benötigt, die Koordinaten des Start- und Endpunktes und der Modus. So ergibt sich eine Tabelle mit zwei Spalten: dem Zeiger auf die zugehörige Graphik-Funktion und der Anzahl der Parameter.
Tabelle mit Zeigern auf Funktionen
Die Sprache C macht den Umgang mit Zeigern nicht gerade einfach. Auch nach vielen Jahren Programmierpraxis ist die zugehörige Syntax immer wieder verwirrend. Zum Glück konnte ich noch meinen alten „Kernighan & Ritchie“ im Regal finden (meine Ausgabe ist von 1986). Dieses immer wieder erstaunliche Buch zeigt die zugehörige Syntax.
Kernighan & Ritchie, Ausgabe 1986
Und so ist der neue Instruktions-Interpreter entstanden. Das Kernstück, die zweidimensionale Tabelle, wird mit Hilfe einer Struktur definiert.
1
2
3
4
typedefstruct{
void(*cmd_func)(void);
int8_t parm_count;
}cmd_entry_t;
Die Formulierung void (*cmd_func)(void) ist ein Platzhalter für die Zeiger auf die jeweiligen Graphik-Funktion. Die Instruktions-Tabelle ist ein Array von der oben definierten Struktur. Sie wird gleich mit den entsprechenden Einträgen initialisiert:
1
2
3
4
5
6
7
8
9
10
cmd_entry_t cmd_table[]={
{cmd_ignore,0,},// 0
{cmd_glcd_on,0,},// 1
{cmd_glcd_off,0,},// 2
{cmd_set_display_light,1,},// 3
{cmd_set_dim_on,0,},// 4
{cmd_set_dim_off,0,},// 5
{cmd_set_i2c,1,},// 6
...
};
Natürlich müssen die Funktionen, die in der Tabelle auftauchen, entsprechend definiert sein. Hier sind die Funktions-Prototypen gezeigt, die üblicherweise in einer #include-Datei stehen:
1
2
3
4
5
6
7
8
9
// command function prototypes
voidcmd_ignore(void);
voidcmd_glcd_on(void);
voidcmd_glcd_off(void);
voidcmd_set_display_light(void);
voidcmd_set_dim_off(void);
voidcmd_set_dim_on(void);
voidcmd_set_i2c(void);
...
Im Instruktions-Interpreter wird das Command-Token über das I2C-Interface eingelesen, der Wertebereich überprüft, und wenn der passt die entsprechende Funktion aufgerufen.
1
2
3
4
5
6
7
8
9
cmd_token=I2C_fetch_byte();// get instruction token
if(cmd_token<sizeof(cmd_table)/sizeof(cmd_entry_t)){// range check
parm_buffer[i]=I2C_fetch_byte();// if yes, get parameters
(*cmd_table[cmd_token].cmd_func)();// and call graphic function
}else{
cmd_show_error();// if not, show error
};
parm_buffer[] ist ein globales Array, in dem der aktuelle Command-Token und die zugehörigen Parameter abgelegt werden. Dieses Array wird von den Graphik-Funktionen genutzt, um die jeweilige Aktion zu steuern. Als Beispiel wird hier die Funktion cmd_draw_line() gezeigt, die die zugehörige Graphik-Funktion zum Zeichnen einer Linie aufruft:
1
2
3
4
/* cmd_draw_line - plots a straight line -----------------------*/
Nach einigen Versuchen funktioniert der neue Instruktions-Interpreter ganz hervorragend. Das Programm ist damit deutlich kürzer und effizienter geworden.
Die neue Software ist bei den Ressourcen zu finden unter Smart I2C Display, Firmware
Solarenergie eignet sich ganz hervorragend zur Beleuchtung im Garten. Aber leider waren meine bisherigen Versuche, eine ansprechende Lampe zu finden, erfolglos. Deshalb habe ich mich auf den Weg gemacht, einen preisgünstigen Solar-Strahler so umzubauen, dass er meinen Ansprüchen gerecht wird. Hier folgt eine Beschreibung dieses Selbstbau-Projekts.
Der lokale Baumarkt hat immer wieder sehr preisgünstige Solarlampen für den Garten im Angebot, die dann verkaufsoptimiert in Regalen direkt an der Kasse liegen. So eine Lampe landete neulich auch in meinem Einkaufswagen. Zu Hause zeigte sich aber, dass die Lichtausbeute gering ist. Auch die kalt-weiße Lichtfarbe gefiel mir nicht. Nach dem Aufschrauben fand ich drei parallel geschaltete 5 mm-LEDs, die über ein vierbeiniges IC mit dem kleinen Solarpanel und einer NiMH-Zelle verbunden waren. Eine Festinduktivität deutete auf eine „joule-thief“-Schaltung hin.
Sicherlich kann man für den kleinen Preis nicht mehr Technik erwarten. Die Frage ist: Wenn ich bereit bin, etwas mehr zu investieren, wie kann man es besser machen? Auf der Wunschliste stehen: Helleres und warm-weißes Licht mit gleichbleibender Leuchtstärke, begrenzte Brenndauer am Abend zum schonenden Umgang mit der beschränkten Solarenergie und ein pfleglicher Umgang mit dem Akku für eine lange Lebensdauer.
Hier ein Vorschlag, der diese Kriterien erfüllt – und inzwischen unseren heimischen Garten an verschiedenen Punkten erleuchtet.
SMD-LED
Mehr Licht braucht in erster Linie eine stärkere LED. Die ursprünglichen 5mm-LEDs wurden durch eine SMD-LED, hier die STW8Q14C von Seoul Semiconductor ersetzt. Diese LED ist für 100mA Dauerleistung bei etwa 3V ausgelegt und in meiner bevorzugten warm-weißen Licht-Farbe zu bekommen. Diese LED ist trotz SMD-Bauform ausreichend groß, so dass man sie ohne Probleme auf einem Stück Lochrasterplatine auflöten kann. Zusammen mit einem Vorwiderstand von 10 Ohm auf der Rückseite der Platine kommt die neue LED auf den Reflektor und wird dort mit eine Tropfen Sekundenkleber befestigt. Das Strahlergehäuse vom Baumarkt erfüllt gute Dienste. Diese Anordnung produziert ein sehr schönes und kräftiges Licht.
SMD-LED an ihrem Arbeitsplatz
Energieversorgung
Die stärkere LED braucht mehr Strom, was unweigerlich zu einem größeren Solarpanel und Energiespeicher führt. Von früheren Projekten hatte ich noch ein Panel von 11 x 6 cm Größe in der Bastelkiste. Das Panel liefert eine Leerlaufspannung von maximal 5.5V und einen Kurzschlussstrom von 150mA. Als Energiespeicher kommen drei NiMH-Zellen, Größe AA, aus dem besagten Baumarkt zum Einsatz. Die Akkus werden in Reihe zu einem „Battery-Pack“ zusammengeschaltet und liefern so eine Ausgangsspannung zwischen 3.0 und etwa 3.8V. Das Solarpanel versorgt den Akku über eine Schottky-Diode, die die Batterie vor Entladung schützt. Meine Messungen zeigten einen Ladestrom zwischen 130mA am leeren und 80mA am vollen Akku. An sehr sonnigen Tagen muss der Akku gegebenenfalls 80mA Dauerladung aushalten, was mir akzeptabel erscheint. Eine Abschaltung bei Vollladung ist also nicht vorgesehen.
Schaltzentrale
Für die Steuerung kommt ein bewährter ATtiny45 zur Anwendung. Der Mikrocontroller hat 3 Aufgaben:
Erstens schaltet er die LED am Abend abhängig von der Spannung des Solarpanels ein und nach einigen Stunden wieder aus. Schließlich besteht kein Bedarf, die Gartenbeleuchtung die ganze Nacht zu betreiben. Stattdessen soll eine Akkufüllung auch bei schlechtem Wetter für mehrere Abende reichen.
Zweitens sorgt der ATtiny als Step-Up Wandler mit Hilfe einer Speicherdrossel für eine konstante Spannung an der LED, so dass die Helligkeit immer gleichbleibend und unabhängig vom Ladezustand des Akkus ist.
Und drittens beobachtet der Prozessor die Akkuspannung und schaltet den LED-Verbraucher aus, wenn die Akkuspannung unter den kritischen Wert von 3.0V fällt. So wird eine schädigende Tiefentladung des Akkus vermieden.
Schaltplan des Solar LED-Strahlers
Der Mikrocontroller bekommt Input von 2 Quellen, die mit Hilfe des ADC ausgelesen werden: ADC-Kanal 2 misst die Spannung am Solarpanel vor der Schottky-Diode, und ADC-Kanal 3 die Akkuspannung. Als Referenz für den ADC wird die die interne Referenz-Spannung von 1.1V verwendet. Deshalb werden die externen Spannungen mit Spannungsteilern (100 versus 33 kOhm) auf das passende Niveau reduziert.
Der Ausgang PB1 schaltet die LED über einen P-Kanal FET (IRLML2244) ein oder aus. Seit einiger Zeit gibt es MOSFETs, die auch mit 3V Steuerspannung durchschalten. MOSFETs haben gegenüber bipolaren Transistoren den Vorteil eines sehr kleinen Durchlasswiderstandes. Dadurch verbessert sich der Wirkungsgrad der Schaltung. Außerdem kann das Gate direkt ohne Vorwiderstand an den Ausgang des Prozessors angeschlossen werden. Nebenbei bemerkt sind die hier verwendeten Power MOSFETs ausgesprochen preisgünstig und in der Tat die billigsten Transistoren, die ich bisher je erworben habe.
Eine Besonderheit dieser Schaltung ist die Spannungserhöhung mit Hilfe eines Step-Up Wandlers. Der Ausgang PB0 produziert ein PWM-Signal von etwa 32kHz, das mit Hilfe eines N-Kanal FETs (IRLML6244) die Speicherdrossel periodisch auf Masse legt. Die Schottky-Diode koppelt die erhöhte Spannung aus, die dann mit dem Elko geglättet wird. Das Ausmaß der Spannungserhöhung kann per Software über das Duty-Verhältnis des PWM-Signals eingestellt werden. Zur Regelung wird der aktuelle Spannungswert am Ausgang über einen weiteren Spannungsteiler auf den ADC-Kanal 1 gegeben. Je nachdem, ob der Wert unter oder über der Zielgröße liegt, wird das Duty-Verhältnis des PWM-Signals angepasst. Diese Regelung klappt sehr gut und funktioniert mit minimaler Hardware. Allerdings geht sie recht langsam von statten, was für diese Anwendung kein Problem ist. Es geht schließlich nur darum, die Ausgangsspannung (und damit den LED-Strom) bei abfallender Akkuleistung nachzuregeln. Und das sind Veränderungen im Minuten- oder Stunden-Bereich.
Software
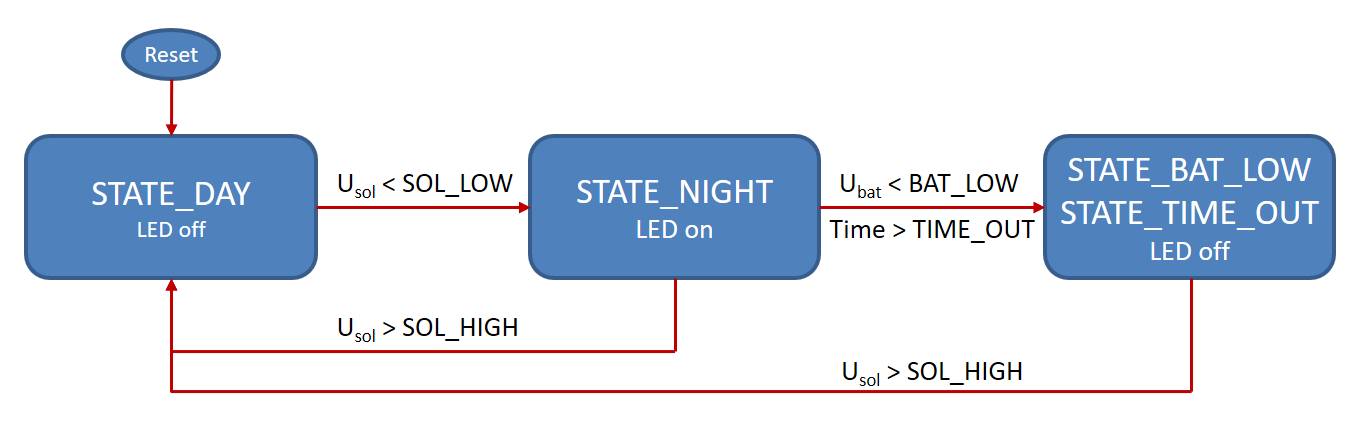
Die Software ist recht überschaubar und passt in eine kurze Datei: solar_led.c Das Programm ist um 3 verschiedene Systemzustände herum organisiert:
STATE_DAY ist der Betrieb am Tag. Der Akku wird geladen und die LED ist ausgeschaltet.
STATE_NIGHT ist der Status nach Einbruch der Dämmerung. Wenn die Spannung an der Solarzelle unter einen Grenzwert absinkt, wird die LED eingeschaltet.
STATE_BAT_LOW nach Absinken der Akku-Spannung unter 3.0V, und STATE_TIME_OUT nach Ablauf der geplanten Leuchtdauer sind eigentlich zwei verschiedene Zustände, die aber identische Eigenschaften haben. In beiden Fällen ist die LED ausgeschaltet. Das System wartet auf den nächsten Morgen.
System-Zustände und ihre Übergänge
Zur Verwaltung der Zustände wird ein regelmäßiger Timer-Interrupt verwendet, der die CPU einmal pro Sekunde aus dem Sleep-Modus weckt. Hier verwende ich den Watchdog-Timer, der im Gegensatz zu den anderen Timern den Vorteil eines sehr geringen Strombedarfs hat. Außerdem erlaubt er die Verwendung des „PWR_DOWN“ Sleep-Mode, was den Chip auf minimalen Stromverbrauch trimmt. Die Schaltung verbraucht bei abgeschalteter LED weniger als 30 µA, was hauptsächlich dem Spannungsteiler geschuldete ist. Der Watchdog-Timer hat den Nachteil geringerer Frequenzstabilität. Bei dieser Anwendung kommt es aber nicht auf exaktes Timing an.
Für den Step-Up Wandler produziert der ATtiny ein PWM-Signal, dessen Duty-Verhältnis über OCR0A eingestellt wird. Der Wert 255 entspricht dem kleinsten Duty-Cycle. Kleinere OCR0A-Werte erhöhen den Duty-Cycle und damit die Ausgangsspannung. Die Routine zur Regelung wird einmal pro Sekunde aufgerufen und ist sehr minimalistisch. Mit jedem Durchlauf wird OCR0A um den Wert 1 erhöht oder vermindert. Wie schon erwähnt ergibt das eine sehr langsame Regelung. Natürlich könnte man einen effizienteren Regelalgorithmus implementieren, aber für diese Anwendung ist die Langsamkeit eine sehr sympathische Eigenschaft. Aus einer nostalgischen Perspektive ist es schön zu sehen, dass die Lampe nach dem Einschalten 30 oder 40 Sekunden benötigt, um volle Helligkeit zu erreichen, ganz wie die alten Natriumdampflampen in früheren Straßenlaternen …
Die Konstante TIME_OUT definiert die Brenndauer der LED in Sekunden. Im Programm-Listing ist der Wert von 14400 vorgegeben, was 4 Stunden entspricht. Hier sind natürlich beliebige andere Werte möglich.
Das Programm verwendet eine Umschaltverzögerung von 1 Minute. Ohne diese Verzögerung besteht die Gefahr, dass in der Nacht eine kurzzeitige Beleuchtung der Solarzelle (z.B. ein vorbeifahrendes Auto) den Prozess neu startet. Die Dauer der Verzögerung kann über die Konstante SWITCH_DELAY eingestellt werden.
Der ATtiny arbeitet in dieser Anwendung mit dem internen 8MHz Taktgenerator. Dazu muss die CKDIV8-Fuse gelöscht werden. Alle anderen Fuse-Einstellungen bleiben unverändert.
Praktisches
Mit etwas Geduld und einer ruhigen Hand kann man die Schaltung auf einem recht kleinen Stück doppelseitiger Lochraster-Platine aufbauen. Das folgende Bild zeigt ein mögliches Layout.
Layout auf einer doppelseitigen Lochrasterplatine. Schwarze Linien zeigen Verbindungen auf der Unterseite, und roten Linien Drahtbrücken auf der Oberseite. Die Speicherdrossel L wird senkrecht gestellt. Die Anschlüsse für Akku, Solar-Panel und LED werden mit flexiblen Kabeln herausgeführt.
Die FETs sind kleine SMD-Bauteile, die aber mit dem Lötkolben noch einigermaßen handhabbar sind. Es hat sich bewährt, sie ziemlich am Anfang der Lötarbeiten einzubauen. Dafür lasse ich kurze versilberte Kupferdrähte auf der Oberseite der Platine passend herausstehen, auf die die FETs dann aufgelötet werden. Dasselbe gilt für die SMD-Speicherdrossel, die aber erfreulicherweise wesentlich grösser ist.
Montage der SMD FETs. Oben: Zuerst schauen kurze versilberte Kupferdrähte aus der Oberseite der Platine (oben links), auf denen die Transistoren dann Platz finden (oben Mitte). Entsprechend wird auch die SMD-Speicherdrossel eingebaut (oben rechts). Unten: Fertig bestückte Platine mit Anschlussdrähten
Vor dem Einbau in das Gehäuse muss der gewünschte LED-Strom über den Trimmer eingestellt werden. Den LED-Strom kann man sehr einfach als Spannung am 10 Ohm-Vorwiderstand der LED messen. Nach dem Anschluss eines nicht ganz voll geladenen Akkus, jetzt noch ohne Solarzelle, sollte die LED kurz aufleuchten als Funktionskontrolle und dann erst einmal dunkel bleiben. Jetzt heißt es Warten auf den verzögerten Zustandswechsel. Nach 1 Minute schaltet sich die LED ein. Damit beginnt die Regelung der Ausgangsspannung. Im Sekunden-Rhythmus steigt der LED-Strom an, um dann bei einem Maximalwert zu verharren. Am Trimmer lässt sich dieser Wert einstellen. Sinnvolle Werte liegen zwischen 0.7 und 1.0 V (entspricht 70 bis 100 mA). Allerdings braucht der Einstellvorgang etwas Geduld, da die Software auf jede Änderung in kleinen Schritten reagiert.
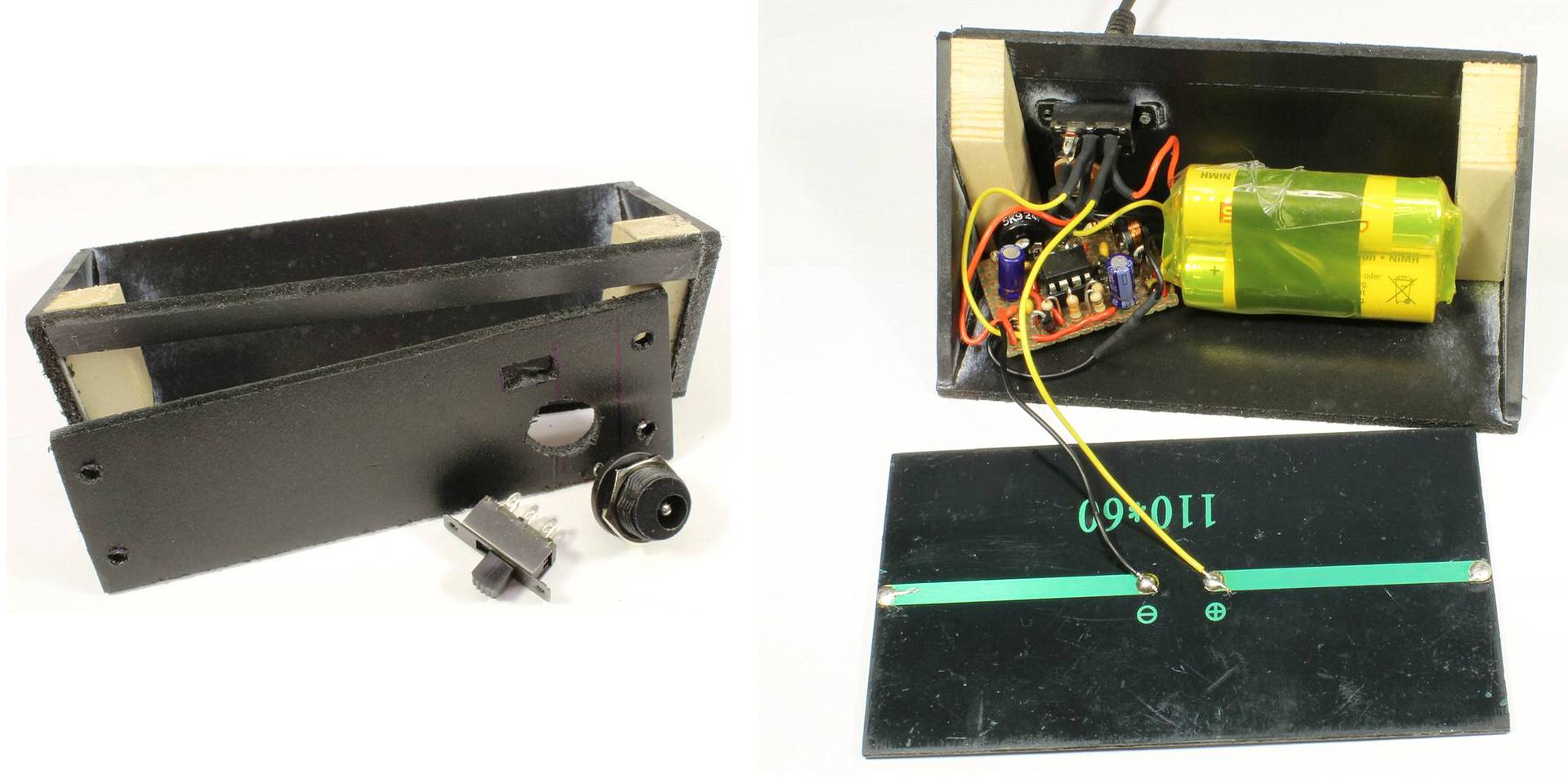
Das Gehäuse besteht aus der um etwa 45 Grad schräg gestellten Solarzelle und Plastikteilen für Boden, Seiten und Rückwand, die aus einer Kunststoffplatte aus dem Bastelbedarf zugeschnitten werden. Kleine Holzleisten dienen zur Stabilisierung. Die Teile werden mit 5-Minuten Epoxy verklebt, was auch zur Dichtung gegen Spritzwasser dient. Die Solar-LED ist für den längerfristigen Einsatz im Garten gedacht. Zum weiteren Schutz vor Regen werden Elektronik und Akku in Schrumpfschlauch untergebracht. Der Einbau sollte aber nicht komplett luftdicht sein, um Kondenswasser zu vermeiden. Zum Schluss wird die Rückwand aufgeschraubt.
Links: Gehäuse-Teil für die Elektronik Rechts: Blick in das Gehäuse mit geöffneter Solarzelle
Dem Einsatz im Garten steht jetzt nichts mehr im Wege. Es ist erstaunlich, wieviel Licht diese kleine LED produziert. Das Schöne an solar-getriebenen Leuchten ist, dass sie (hoffentlich) täglich und klaglos ohne weitere Zutun ihren Dienst leisten.
Solar LED im Garten
Ressource: Der Schaltplan, das Lochraster-Layout und die aktuelle Firmware (Atmel Studio 7) sind auf der Ressourcen-Seite verfügbar zum Download
Viele Mikrocontroller-Systeme verwenden kleine LC-Displays für die Anzeige von Systemzuständen, Daten, Ereignissen, und vieles anderes. Monochrome Text-Displays basierend auf dem HD44780-Controller haben sich als weit verbreiteter Standard etabliert. Sie sind preisgünstig, in verschiedenen Größen und Farben zu bekommen, sind zurückhaltend im Stromhunger und lassen sich einfach an die meisten Mikrocontroller-Systeme anschließen. Oft kommt aber der Wunsch nach mehr Funktionalität. Für viele Anwendungen sind Graphiken wie z.B. Balkendiagramme, Pegelanzeigen, Kurvenverläufe usw. viel besser geeignet als Text. Solche Diagramme helfen dem Auge, die Daten intuitive zu erfassen.
Der Einsatz von graphischen Displays stellt aber insbesondere kleine Systeme mit beschränkten Ressourcen vor erhebliche Probleme. Hier beschreibe ich ein universelles Interface, das die Anwendung der weit verbreiteten KS0108-Displays sehr einfach macht und das Host-System soweit wie möglich entlastet. Das Interface bietet eine Reihe von Graphik-Funktionen an, die über das universelle I2C-Interface aufgerufen werden. So lassen sich KS0108-Displays durch beliebige Systeme vom 8-Bit Mikrocontroller bis zum Raspberry Pi ohne zusätzliche Treiber ansteuern.
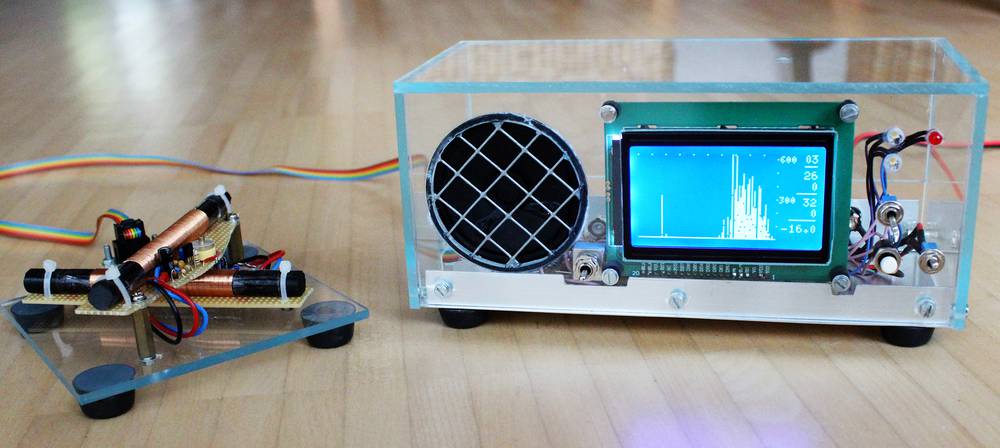
Das Smart I2C Graphik-LCD im Einsatz: Anzeige eines Mikrocontroller-gesteuerten SDRs (links) Log-Daten eines Gewitter-Monitors (rechts)
Ausgangspunkt
Auf der Suche nach einem Display, das im einfachen Handling den HD44780-Typen entspricht, jedoch auch graphische Qualitäten hat, bin ich auf die (schon etwas ältere) Familie der KS0108-Controller gestoßen. Schon seit geraumer Zeit gibt es eine Vielzahl von solchen graphischen LCDs in verschiedenen Größen und Farben, meistens mit Auflösungen von 64 * 128 oder 64 * 192 Pixeln. Auch wenn diese eher geringe Auflösung nicht unbedingt auf der Höhe der Zeit ist, so erlauben diese Displays doch genau die Art der Diagramme, die ich bei verschiedenen Projekten einsetzen wollte. Außerdem sind diese Displays sind sehr preisgünstig zu bekommen und sparsam im Stromverbrauch.
Die nähere Beschäftigung mit den Graphik-LCDs zeigte jedoch, dass die Ansteuerung deutlich anspruchsvoller ist als für die bewährten Text LCDs. Der Datentransfer zwischen Host-System und Display ist naturgemäß intensiver und benötigt einen 8-Bit parallelen Port zuzüglich einer Reihe von Steuerleitungen. Damit sind die verfügbaren Ports am Mikrocontroller schnell vergeben. Die mitgebrachte Funktionalität der KS0108-Systeme ist sehr beschränkt und erlaubt nur das byte-weise Setzen oder Löschen von Pixeln. Das Zeichnen von Linien, Kreisen oder Texten benötigt allerlei logische Operationen mit dem Display-Memory, wobei das notwendige Timing exakt eingehalten werden muss. Es gibt zwar gute Bibliotheken für die meisten Zielsysteme (z.B. Referenz 1, 2). Trotzdem ist der Aufwand für das Host-System beträchtlich, da ein großer Teil der Ports, Timer, des Programmspeichers und der Rechenpower durch die Ansteuerung des Graphik-LCD ausgelastet sind. Die verbleibenden Ressourcen für die eigentliche Aufgabe des Host-Systems sind beschränkt.
So entwickelte sich die Idee, einen dedizierten Treiber mit Hard- und Software zu konstruieren, der auf der einen Seite die Komplexität der Graphik-Ansteuerung vollständig übernimmt und auf der anderen Seite dem Host-System ein serielles Interface anbietet, das Graphik-Anweisungen entgegennimmt. Das Smart I2C Graphic LCD Interface war entstanden.
Interfaces
Im Zentrum des Graphik-LCD-Interfaces befindet sich ein ATmega328, der dediziert für die Arbeit mit dem Display abgestellt ist. Der ATmega versorgt die Daten- und Steuerleitungen des Displays. Auf der Eingabe-Seite kommuniziert er mit dem Host System als I2C-Slave. Die Wahl fiel auf die I2C-Schnittstelle, weil die meisten Mikrocontroller-Systeme dieses Protokoll bereits verwenden, um mit Sensoren, Speicherbausteinen oder anderen Komponenten in Verbindung zu treten. Es sollte also relativ einfach sein, das I2C GLCD in ein bestehendes System einzufügen. Hilfreich ist auch die Tatsache, dass die I2C-Adresse über ein entsprechendes Kommando im verfügbaren Adressraum frei gewählt werden kann. Es ist sogar möglich, mehrere Displays an einem Host-System zu betreiben.
Da das I2C-Protokoll ist Plattform-unabhängig ist, arbeitet das Graphik-Display gleichermaßen gut mit AVR, Arduino, STM32 oder dem Raspberry PI zusammen. Der ATmega wird mit 3.3V versorgt, ist aber 5V-tolerant, so dass keine Pegelwandler benötigt werden. Die hier gezeigte Implementierung funktioniert sehr gut mit I2C-Taktgeschwindigkeiten zwischen 100 und 400kHz (Standard-mode und Fast-mode).
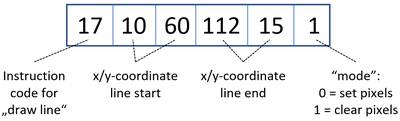
Das I2C-Interface nimmt Instruktionen byte-weise entgegen. Das Format ist für alle Instruktionen gleich: Zuerst wird ein Instruktions-Code gesendet, z.B. für das Zeichnen einer Linie oder der Ausgabe eines Textes, gefolgt von verschiedenen Paramater, z.B. Start- und End-Koordinaten der Linie oder die Zeichen des Text-Strings. Im Laufe der Entwicklung des Interfaces hat sich die Liste der verfügbaren Instruktionen stetig entwickelt und ist recht umfangreich geworden. Sie beinhaltet das Zeichnen von durchgezogenen oder gepunkteten Linien, gefüllten oder offenen Kreisen oder Rechtecken, die Ausgabe von Texten in verschiedenen Schrifttypen, und mehr.
Beispiel für die Anweisung zum Zeichnen einer Linie: 6 Bytes werden gebraucht, um die Linie zu definieren.
Das Dokument Smart I2C GLCD Instruction Set zeigt eine tabellarische Aufstellung aller verfügbaren Instruktionen. Neben Funktionen zum Zeichnen und Löschen von graphischen Elementen gibt es auch Funktionen zur Ausgabe von Zeichen und Texten.
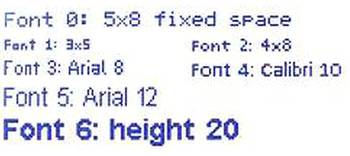
Verfügbare Zeichensätze: 7 Fonts sind bereits enthalten
„Rundum sorglos Paket“
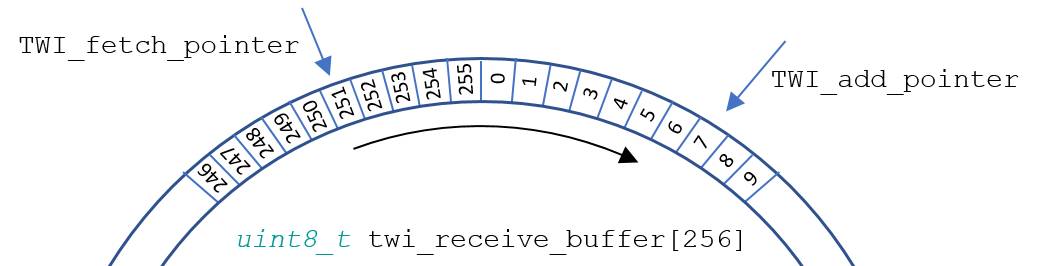
Eine Besonderheit ist der interne Datenpuffer, der das Host-System von jeder Sorge bezüglich Timing befreit. Der ATmega ist so programmiert, dass die Anforderungen vom Host über das I2C-Interface einen Interrupt triggern. In der Interrupt-Routine werden die Daten entgegengenommen und in einem Ringpuffer abgelegt. Das Hauptprogramm arbeitet den Puffer sukzessive ab. Die Tatsache, dass manche Anweisung (z.B. die Ausgabe eines längeren Strings) mehr Zeit benötigen als andere (z.B. das Setzen eines Pixels) ist aus Sicht des Host vollständig uninteressant. Solange der Puffer nicht voll ist – was in der Praxis praktisch nicht vorkommt – kann das Host-System die Graphik-Instruktionen zu jeder Zeit absetzten und braucht sich nicht darum zu kümmern, ob das Display bereit ist zur Eingabe oder nicht. Dieses „rundum sorglos Paket“ vereinfacht die Arbeit mit dem Display enorm.
Ringpuffer mit Schreib- und Lesepointer. Die I2C-Interrupt-Funktion fügt ankommende Bytes bei TWI_add_pointer hinzu. Die Funktion TWI_fetch_byte(), aufgerufen vom Instruktions-Interpreter, liest die Daten am TWI_fetch_pointer aus dem Puffer. Wenn Schreib- und Lesepointer auf dieselbe Position zeigen, dann ist der Puffer aktuelle leer.
Für Daten-intensive Anwendungen, bei denen ein Puffer-Overflow denkbar wäre, ist ein „Buffer Empty (B/E)“ Signal herausgeführt. Das Host-System kann den Status testen und gegebenenfalls warten, bis der Puffer leer ist. Bislang hat sich bei meinen Anwendungen dafür nur selten Bedarf ergeben.
Instruktions-Umfang
Das Display stellt eine lange Liste von Graphik-Funktionen bereit, z.B. das Setzen und Löschen von einzelnen Pixel, das Zeichnen von Linien, Rechtecken, gefüllten Flächen, Kreisen oder Segmente von Kreisen. Darüber hinaus gibt es die Möglichkeit der Textausgabe als einzelne Zeichen oder längere Strings. Die Textausgabe wird über einen Cursor gesteuert, der beliebig gesetzt werden kann. Es gibt die Möglichkeit automatischen Zeilenumbruch und Textscrollen zu setzen, sodass das Display auch für eine fließende Terminal-Ausgabe verwendet werden kann. Standardmäßig stehen 6 verschiedene Schriftsätze zur Verfügung.
Weiter gibt es Funktionen für die Ausgabe von Daten als Linien- oder Punkte-Diagramme. Diese Funktionen sind z.B. nützlich für die Visualisierung von zeitlichen Abläufen (z.B. Temperatur-Log) oder wissenschaftliche Daten.
Das I2C-Interface wird bi-direktional verwendet und bietet die Möglichkeit, Display-Parameter auszulesen. Zum Beispiel können die aktuelle Cursor-Position, die Länge von Strings in Pixeln oder die Höhe des angewählten Fonts abgefragt werden. Diese Funktionen sind nützlich, um die Grösse von weiteren graphische Elemente anzupassen. Das folgende Beispiel für den Arduino zeigt die Ausgabe eines Textes links oben im Display, gefolgt von der Abfrage der aktuelle Cursor-Position (der steht jetzt am Ende des Textes) und der aktuellen Höhe des Zeichensatzes. Mit diesen Daten wird dann eine Linie direkt unter den Text gezogen.
1
2
3
4
5
6
7
my_gd.set_font(4);
my_gd.set_cursor(0,0);
my_gd.draw_str("Smart I2C GLCD Demo with Arduino");
delay(40);// ensure display ist ready prior to read request
Allerdings gibt es beim Auslesen von Display-Parametern die Einschränkung, dass der Lese-Zugriff vom Host in Echtzeit stattfindet, also nicht gepuffert ist. Das Display muss die Daten aufbereiten, bevor der I2C-Read-Zugriff ausgeführt wird. Ansonsten kommen vorherige Werte aus dem Lese-Puffer über die Leitung. Deshalb empfiehlt es sich, entweder vor dem Ausführen der Abfrage einen Moment zu warten (40 msec wie im obigen Beispiel sind meist ausreichend) oder das Buffer/Empty-Signal abzufragen, bis der Puffer leer ist. Dann klappt es aber reibungslos.
Die vollständige Liste der Instruktionen ist als PDF verfügbar. Smart I2C GLCD Instruction Set_v1-1 Weitere Funktionen werden nach Bedarf hinzu kommen. Input ist auf jeden Fall willkommen.
Weitere nützliche Funktionen
Wenn schon ein I2C-kommunizierender ATmega am Display vorhanden ist, kann er auch noch andere nützliche Aufgaben übernehmen, z.B. die Versorgung der Hintergrund-Beleuchtung des Displays. Dazu erzeugt der ATmega ein PWM-Signal, das über zwei Transistoren die Beleuchtung regelt. Die Helligkeit wird ebenfalls über eine I2C-Instruktion gesteuert. Werte zwischen 0 (aus) und 10 (maximale Leuchtstärke) sind einstellbar. Die Helligkeits-Werte werden mit Hilfe einer logarithmischen Tabelle in die entsprechenden PWM-Wert umgesetzt, so dass eine gleichmäßige Abstufung entsteht.
Schließlich ist das System so ausgelegt, das Schlüssel-Parameter wie die aktuelle I2C-Adresse und Beleuchtungseinstellung im eePROM abgelegt werden, so dass sie beim Power-On wieder hergestellt werden.
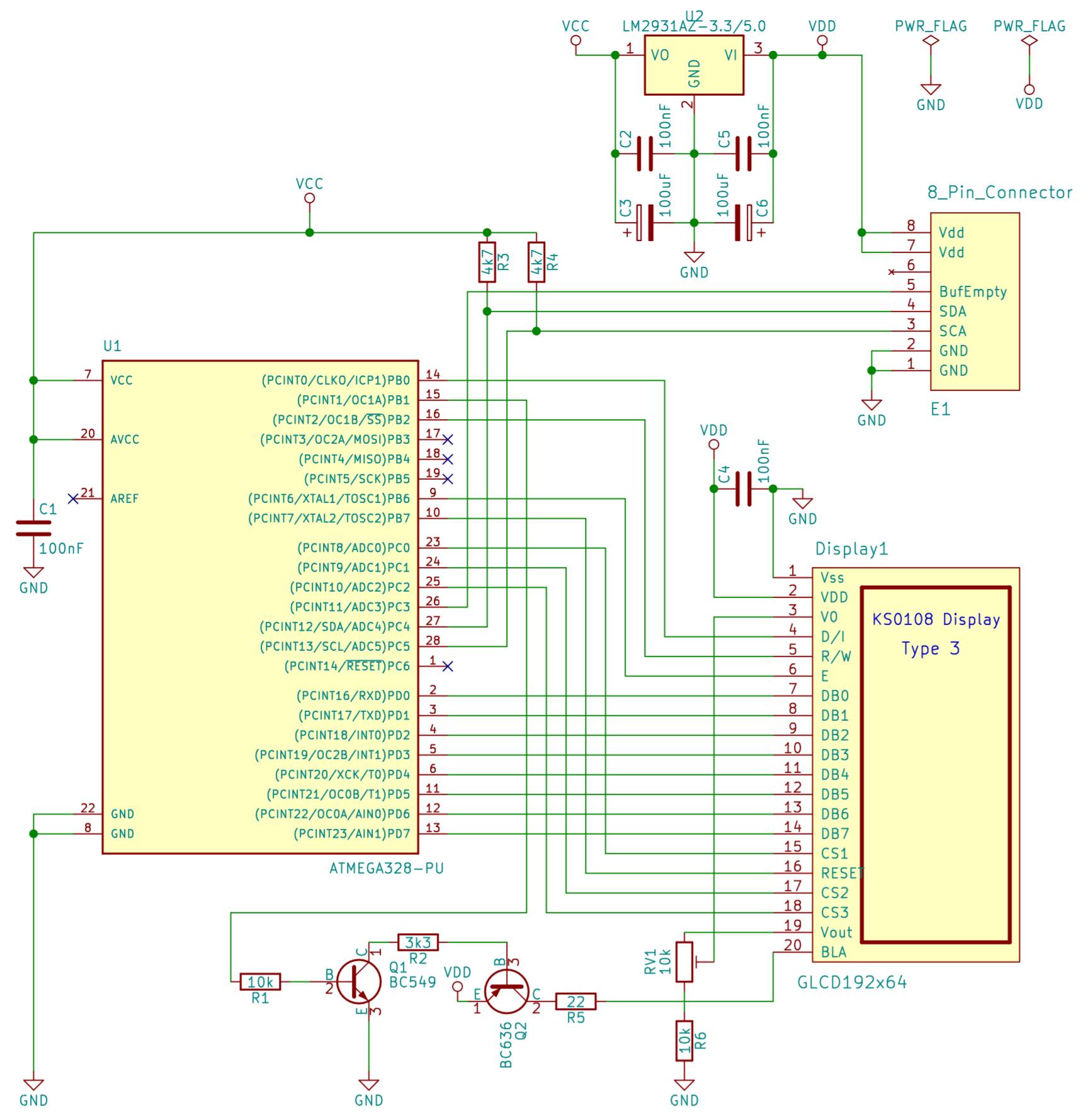
Die Hardware
Die Schaltung ist sehr einfach. Ein low-drop Spannungsregler mit zugehörigen Kondensatoren erzeugt 3.3V für den Controller. Das Display benötigt in jedem Fall 5V. Abgesehen vom ATmega gibt es noch zwei Transistoren, die das PWM-Signal für die Beleuchtung verstärken. Je nach Display-Typ können hier bis zu 150 mA fließen. Der maximale Strom wird durch den 22 Ohm Widerstand am BC636 begrenzt. Einige Displays haben bereits eingebaute Vorwiderstände für die LED-Beleuchtung. Gegebenenfalls muss der Widerstand angepasst werden oder kann komplett entfallen. Weiterhin gibt es auf der Platine die Möglichkeit, die I2C-Leitungen mit Pull-Up-Widerständen zu versorgen, hier 4.7 k Ohm, falls das noch nicht an anderer Stelle im System geschehen ist. In der Regel werden diese Widerstände nicht gebraucht.
Der Schaltplan des I2C GLCD Interface kommt mit wenigen Komponenten aus.
Der ATmega arbeitet mit seinem internen 8MHz R/C-Oszillator, so dass für die Takterzeugung keine weiteren Maßnahmen notwendig sind, abgesehen von dem Löschen des CLKDIV8-Flag in den Fuses.
Das Interface-Modul ist relativ sparsam. Der ATmega ist schon von sich aus moderat in Bezug auf den Strombedarf. Wenn es nichts zu tun gibt, wird er in den Sleep-Modus versetzt. Bei abgeschalteter Beleuchtung liegt der Eigenstrom-Bedarf unter 1mA.
Kleiner Form-Faktor
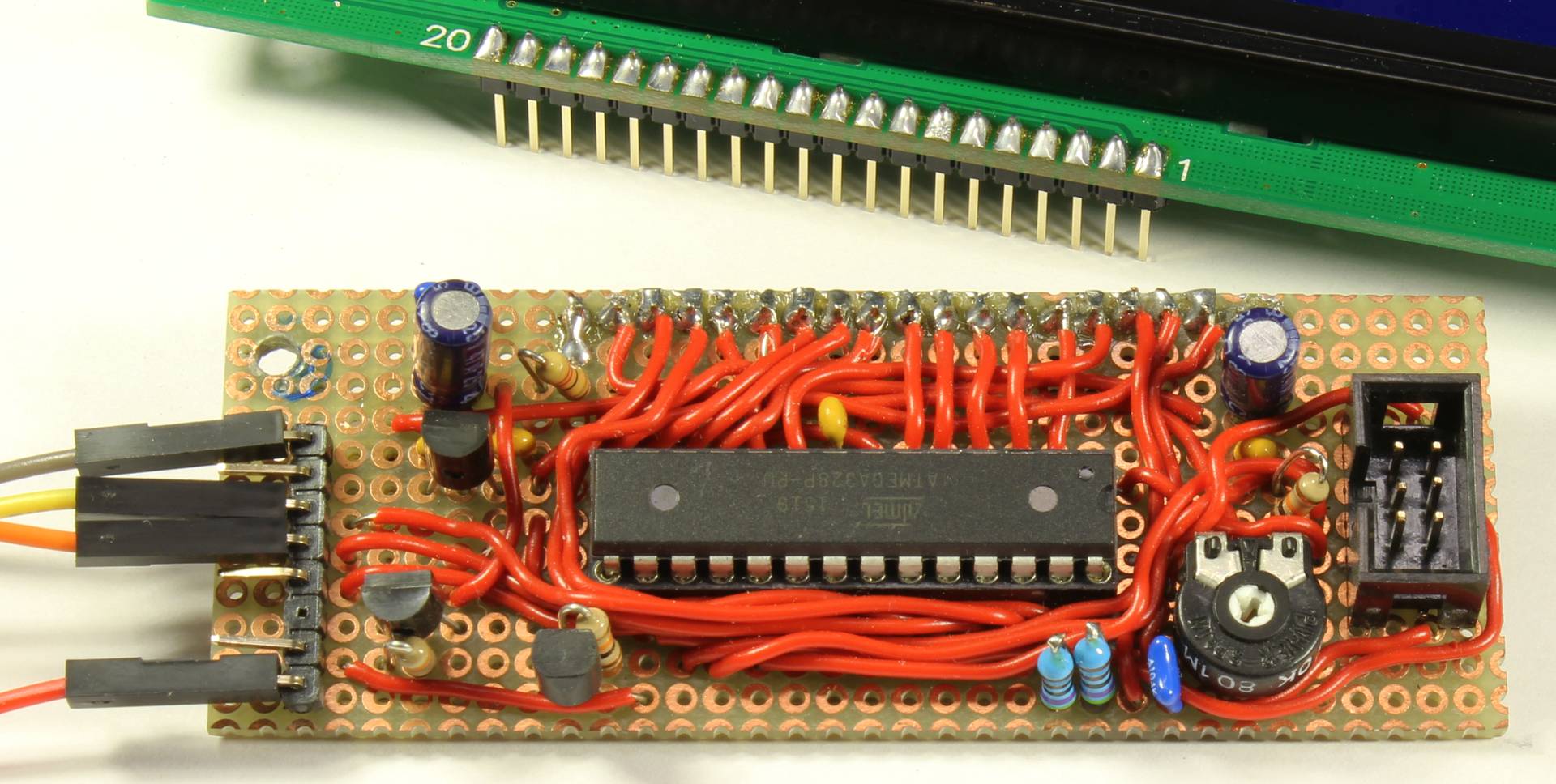
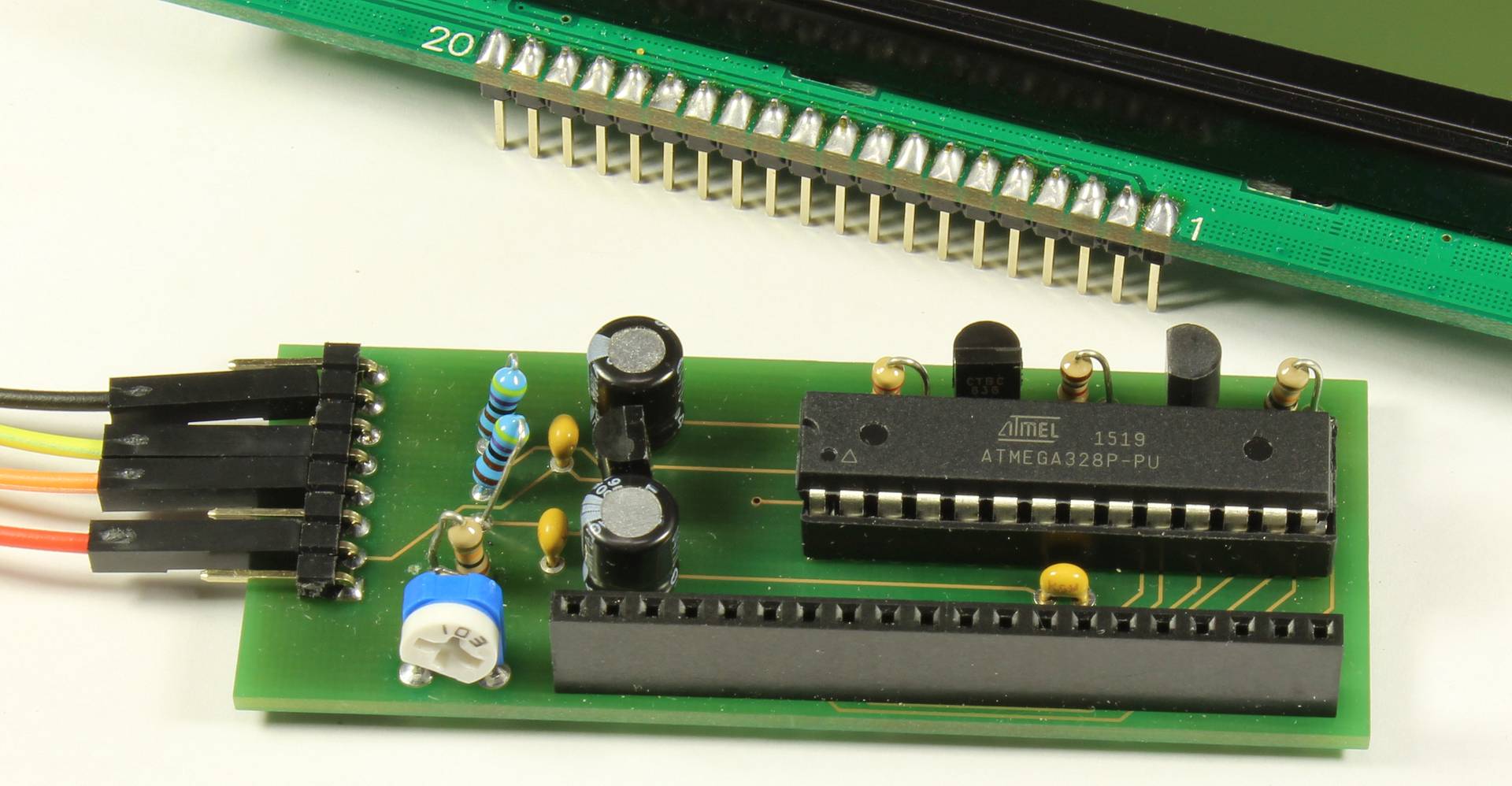
Der ATmega mit etwas Peripherie passt gut auf eine kleine Platine, die von hinten auf das Display aufgesteckt werden kann. Die ersten Prototypen wurden auf Lochraster-Platinen aufgebaut. Die Verbindung zum Display geschieht über einreihige 20-polige Stift- und Sockelleisten. Diese Leiste gibt dem Modul einen ausreichenden mechanischen Halt.
Prototyp-Aufbau auf einer Lochraster-Platine. Die Sockelleiste zur Verbindung mit dem Display befindet sich auf der Rückseite.
Nachdem der Prototyp erfolgreich im Einsatz war, wuchs der Bedarf an Display-Interfaces, so dass sich die Entwicklung und Herstellung einer kleinen Platine lohnte. Die Sockelleiste kommt diese Mal auf die Bestückungsseite. Wenn man niedrige Bauteile für die Bestückung verwendet, verschwindet das komplette Interface-Modul unauffällig hinter dem Display.
GLCD I2C Interface Modul mit Anschlussleiste für das Display
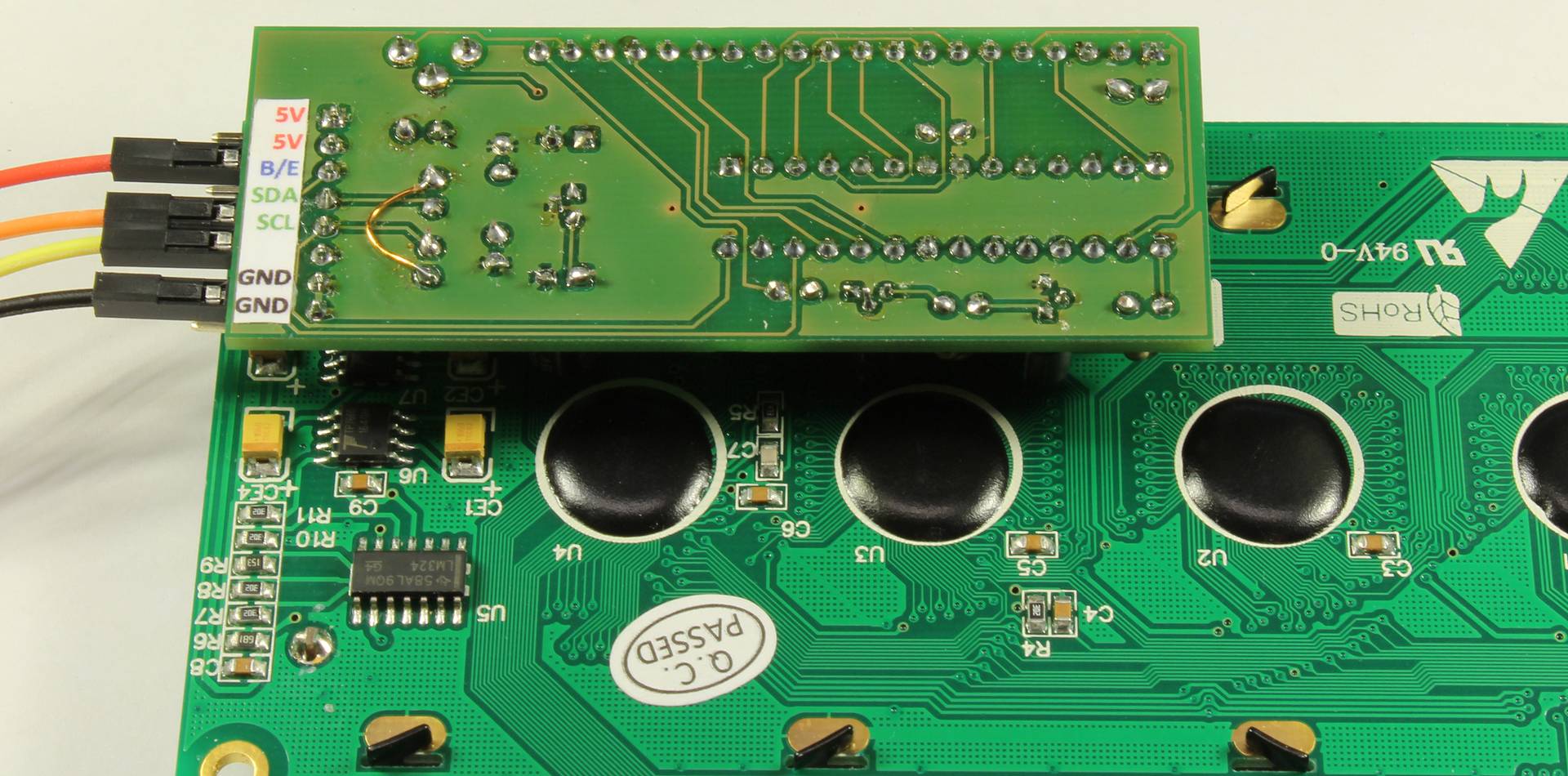
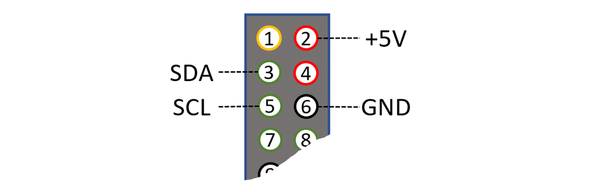
Die Verbindung zum Host-System ist an der Seite als gewinkelte Pfoste-Leiste herausgeführt. Normalerweise werden nur 4 Leitungen benötigt: Masse und +5V zur Stromversorgung und SCL und SDA für den I2C-Bus. Außerdem, falls Bedarf besteht, steht dort das oben angesprochene B/E-Signal an einem Pin zur Verfügung.
Das aufgesteckte Interface-Modul verschwindet unauffällig auf der Rückseite des Displays.
Das Board wurde für Display-Typ 3 entwickelt (siehe nächsten Absatz). Einen ZIP-Ordner mit den Gerber-Files zum Download gibt es auf der Ressourcen-Seite.
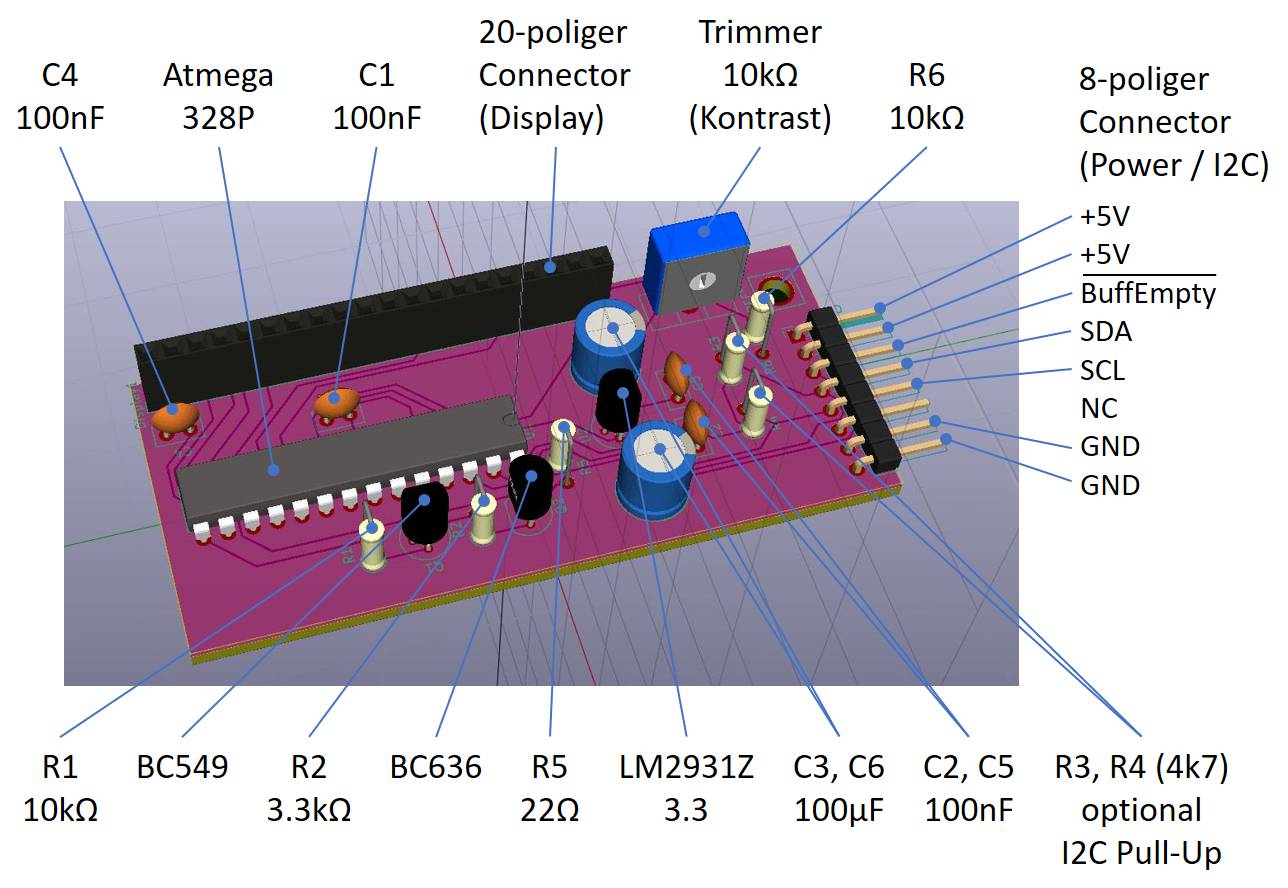
Layout und Bestückungsplan für das Interface-Board
GLCD Typen
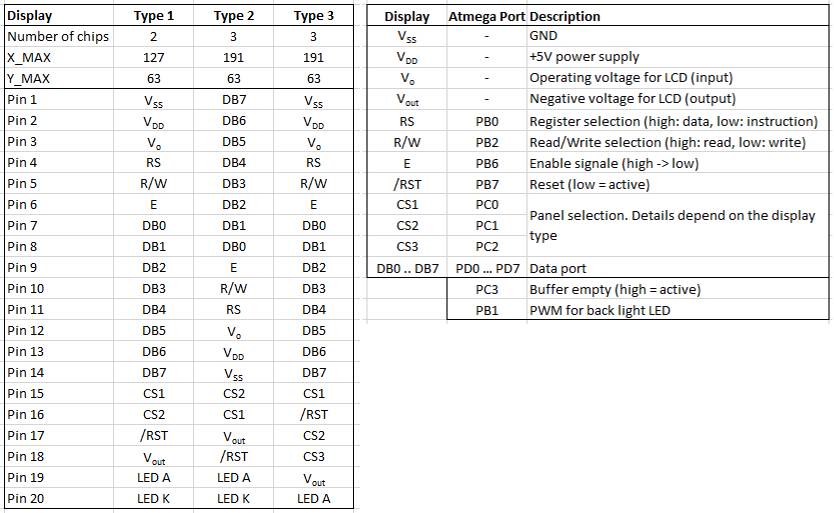
Im Laufe meiner Arbeiten sind mir (mindestens) drei verschiedene Typen von KS0108-Displays begegnet. Im Prinzip funktionieren sie alle ähnlich, unterscheiden sich aber in der Anzahl der KS0108 Chips, der daraus resultierenden Auflösung, der Anschluss-Belegung und der Logik für die Auswahl des jeweiligen KS0108-Chips. Die Tabelle zeigt die drei Display-Typen, wobei die Tabelle natürlich keinen Anspruch auf Vollständigkeit erhebt. Diese drei Typen sind in der Software vorgesehen. Der gewünschte Display-Typ muss vor der Compilierung in der Datei ks0108.h ausgewählt werden.
Links: Eigenschaften und Pin-Belegung von 3 verschiedenen GLCD-Display-Typen. Rechts: Tabelle der ATmega-Port-Belegung.
Die Displays haben mehrer KS0108-Panels an Board, wobei ein Panel für jeweils 64 * 64 Pixel zuständig ist. Entsprechend werden also 2 oder 3 Panels eingesetzt. Die Auswahl der Panels geschieht über die Display-Anschlüsse CS1 bis CS3. Display Typ 1 hat nur zwei Chips die mit CS1 und CS2 selektiert werden. Dabei ist „low“ der aktive Zustand. Display Typ 3 funktioniert analog mit 3 Chips, also ein linkes, ein mittleres und ein rechtes Panel, und verwendet die Anschlüsse CS1 bis CS3. Display Typ 2 hat ebenfalls 3 Chips, selektiert diese aber mit nur zwei Leitungen CS1 und CS2. Wenn beide Leitungen „low“ sind, dann ist das linke Panel angewählt. CS1 auf „low“ wählt das mittlere, und CS2 auf „low“ das rechte Panel.
In jedem Fall wird die Panel-Selektion von der Software des Interface-Moduls verwaltet – sofern der richtige Display-Typ gewählt wurde – und ist für den Anwender vollständig transparent.
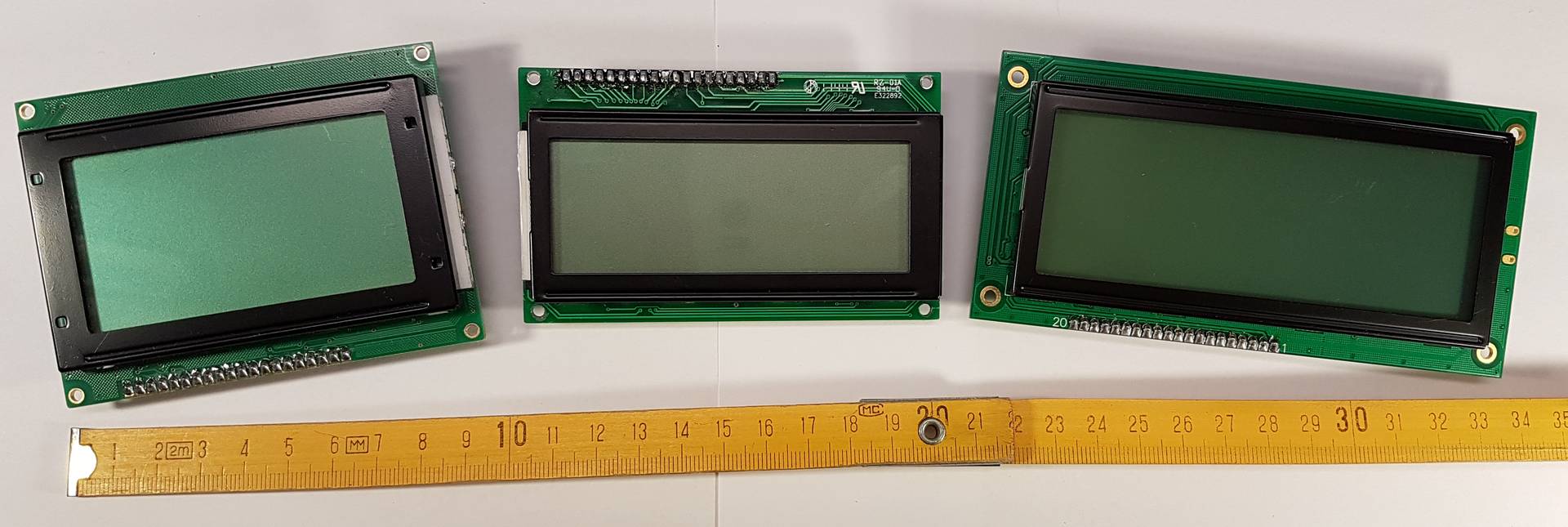
GLCD Display-Typologie Links Typ 1, 128×64 Pixel, 72 x 39 mm, Anschlussleiste unten Mitte Typ 2, 192×64 Pixel, 84 x 31 mm, Anschlussleiste oben Rechts Typ 3, 192×64 Pixel, 97 x 33 mm, Anschlussleiste unten
Software
Auch wenn die Hardware überschaubar ist, so ist die Software für dieses Projekt deutlich komplexer. Die Software wurde in C mit dem AtmelStudio(Version 7) entwickelt. Sie besteht aus den folgenden Modulen:
main.c enthält den System-Initialisierung und Instruktions-Interpreter.
GLCD_routines.c beinhaltet die höheren Graphik-Funktionen einschließlich Fehler- und Bereich-Checks. Diese Funktionen werden vom Instruktions-Interpreter aufgerufen.
ks0108.c beinhaltet die Hardware-nahen Graphik-Funktionen, die direkt mit dem KS0108-Chip zusammenarbeiten
twi_slave.c sorgt sich um das I2C-Interface und verwaltet den Ringpuffer mit den Funktionen zum Auslesen der Daten aus dem Ringpuffer.
smart_I2C_display.h enthält eine Liste der Instruktion-Codes.
Das Software-Paket hat (zur Zeit) insgesamt 7 Zeichensätze für die Ausgabe von Text, die in eigenen #include-Dateien abgelegt sind. Erweiterungen sind jederzeit möglich.
Font #0: system.h, 5×8 fixed space
Font #1: Font_3x5.h
Font #2: Font_4x8.h
Font #3: Arial_8.h
Font #4: Calibri_10.h
Font #5: Arial_12.h
Font #6: Arial_bold_14.h
Zum Teil wurden die Fonts mit einem Public Domain GLCDFontCreator erzeugt (Referenz). Die Datenstruktur der Font-Files folgt einem üblichen Standard ist relativ einfach durchschaubar. Es ist durchaus möglich, einen weiteren Zeichensatz zu kreieren, z.B. für Anwendungs-spezifische Symbole, Pfeil, Sterne, usw. Der Programm-Speicher des ATmega biete noch eine Menge Platz für viel Kreativität.
Anwendungsbeispiel:
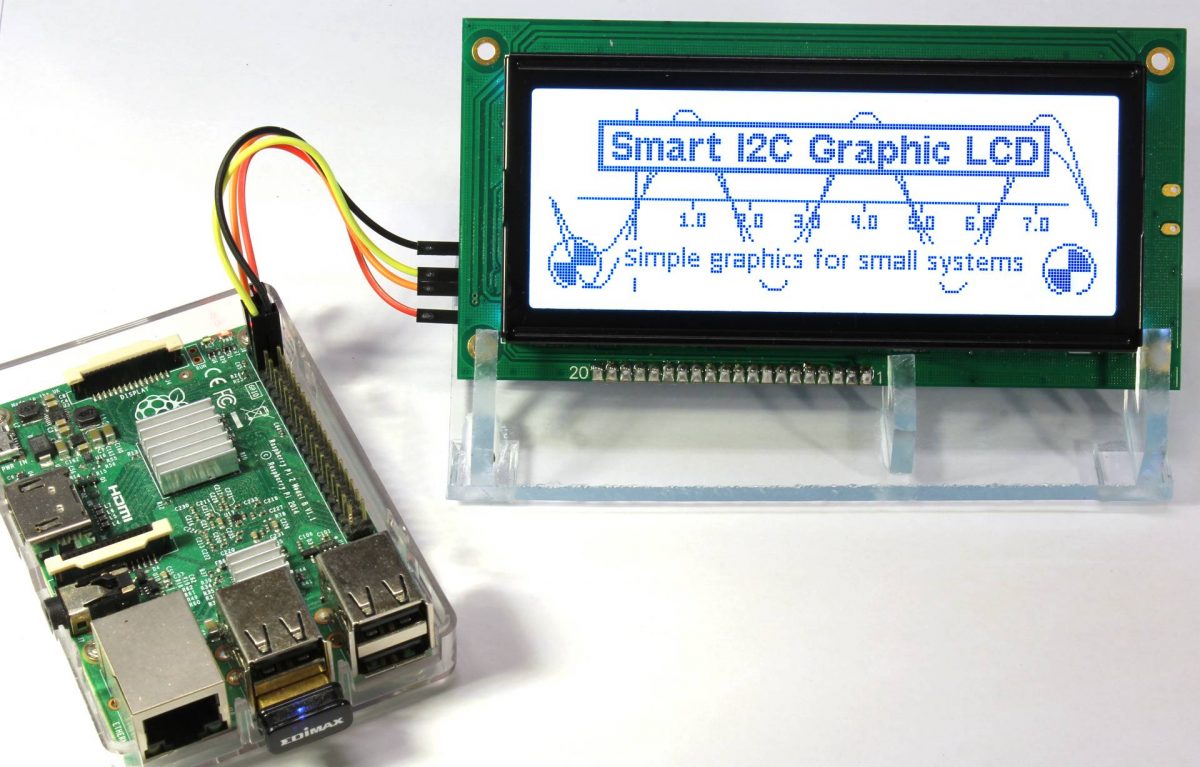
Smart I2C GLCD-Interface am Raspberry Pi
Das Smart I2C GLCD Interface macht die Anwendung der KS1018-Displays sehr einfach. Sofern das Host-System über ein I2C-Master-Interface verfügt, können die Instruktionen direkt zum Display gesendet werden. Und da der Raspberry Pi diese Schnittstelle aufweist, ist der Anschluss an das GPIO sehr einfach.
Das GLCD Interface-Modul wird über 4 Leitungen an das GPIO des Raspberry Pi angeschlossen.
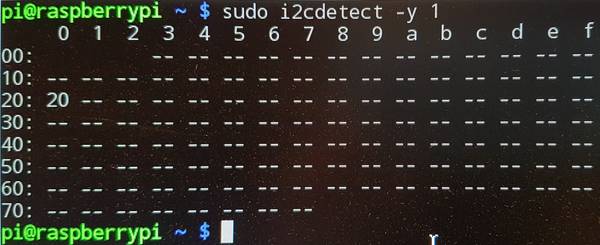
Sobald die vier Leitungen angeschlossen sind, sollte sich das GLCD bei der Abfrage mit sudo i2cdetect -y 1 unter der gewählten I2C-Adresse melden.
Auf dem Raspberry Pi Command Prompt sollte sich das GLCD unter der aktuellen Adresse melden. Der i2cdetect-Befehl zeigt die Adressen im Hexadezimal-Format. 0x20 entspricht dezimal 32.
Der Python-Interpreter erlaubt das interaktive Ausprobieren der einzelnen Instruktionen und macht viel Spaß mit dem Display. Zuerst muss noch der SMBus gestartet werden, und dann kann es losgehen. Die Python-Funktionen write_byte(), write_word_data() und write_i2c_block_data() eignen sich, um das GLCD anzusprechen:
Da das Eintippen der Instruktionen auf die Dauer ermüdend ist, habe ich eine Python-Klasse angelegt, die die Anwendung vereinfacht (siehe glcd_module). Sobald die Datei mit der glcd-Klassendefinition im Suchpfad von Python verfügbar ist, genügen die beiden Anweisungen …
1
2
>>>import glcd_module
>>>gl=glcd_module.glcd(32)
… um eine Instanz des GLCD Modules zu eröffnen. Jetzt stehen alle Instruktionen zur Verfügung, z.B.:
1
2
3
4
>>>gl.clear_screen()
>>>gl.set_font(5)
>>>gl.set_cursor(96,25)
>>>gl.draw_center_string("Hello World")
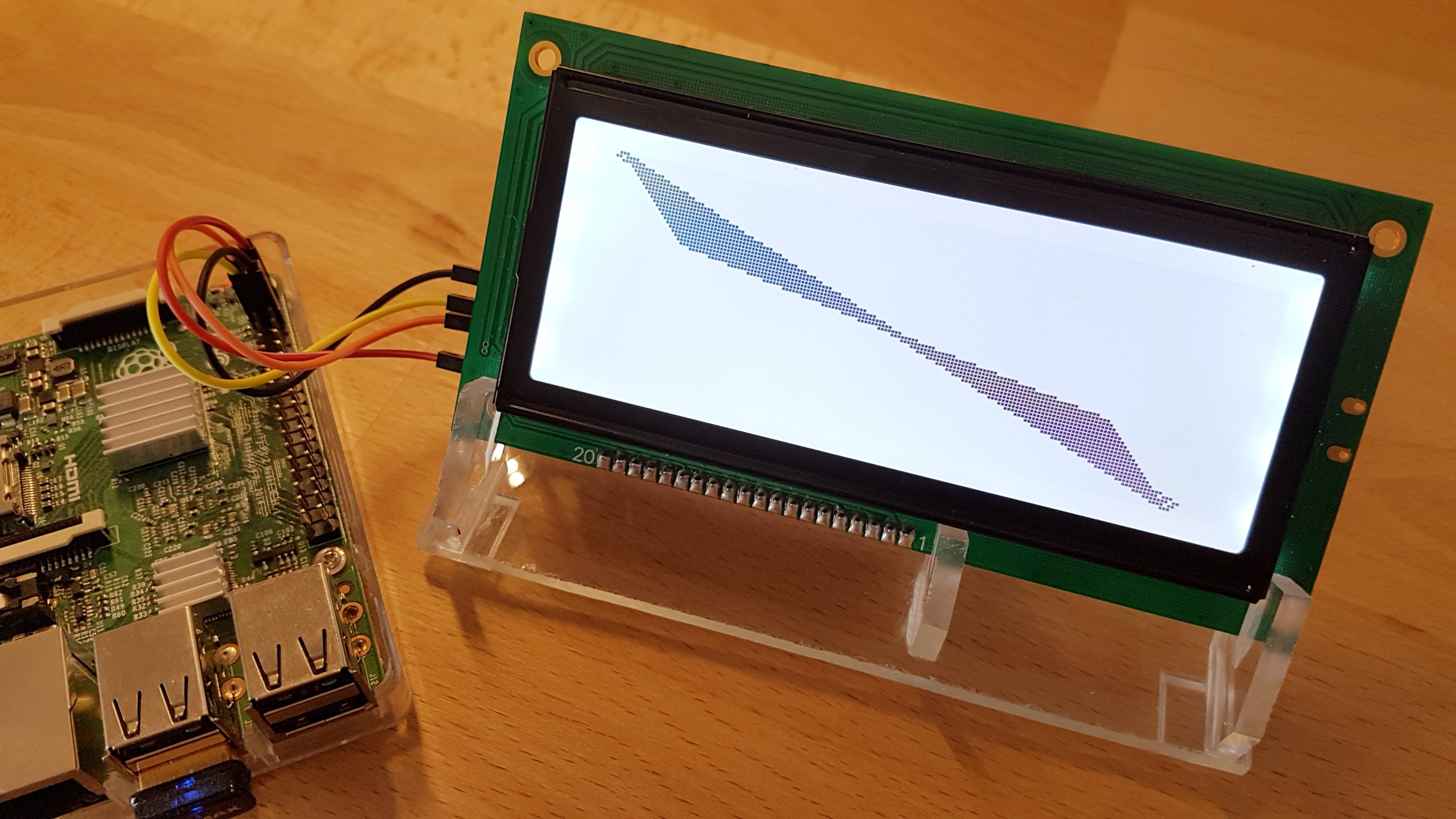
Das kleine Beispielprogramm glcd_demo zeigt einen wandernden Strich auf dem Bildschirm in der Art, wie man es vielleicht von früheren Bildschirmschonern kennt.
GLCD-Interface Modul am Raspberry Pi
Weitere Anwendungen für das GLCD-Interface Modul an ATmega- und Arduino-Host-Systemen folgen in eigenen Beiträgen.
Downloads
Die Seite Ressourcen stellt umfangreiches Material bereit, einschließlich Source-Code im Atmel Studio, Beschreibung der verfügbaren Graphik-Funktionen, Board-Layout für den Display Typ3 3, Bibliotheken und Beispiele für Arduino und Python
Nach Auskunft der Meteorologen lässt der Klimawandel es häufiger blitzen. Mit jedem Grad globaler Erwärmung steigt die Zahl der Blitze. Dabei haben die gewaltigen elektrostatischen Entladungen mit den entfesselten Naturkräften nichts von ihrer Faszination verloren. Um so mehr ein Grund, sich als Hobby-Elektroniker mit diesem Thema zu beschäftigen.
So habe ich mit viel Interesse die Diskussionen und Entwicklungen im Internet verfolgt. Z.B. ist der Franzis-Bausatz „Gewitterwarner“ ist ein schönes Gerät mit allerlei genialen Ideen, zum Beispiel, den AM-Empfänger TA7642 zum Empfang zu verwenden, die Empfindlichkeit durch die Betriebsspannung einzustellen, und die Blitze durch einen Flankendetektor im Mikrocontroller zu erfassen. Super!
Für meine eigenen Versuche wollte ich einen Schritt weiter gehen und den Analog-Digital-Konverter (ADC) des Mikrocontrollers dazu verwenden, Blitze mit hoher Empfindlichkeit über weite Entfernungen zu erfassen und quantitativ auszuwerten. Außerdem wollte ich den Verlauf der Intensität und Häufigkeit der Blitze über die Zeit aufzuzeichnen. Herausgekommen ist mein „Gewitter-Monitor“, den ich hier beschreibe.
Vorüberlegungen
Die Idee war, ein Gerät zu entwickeln, das elektrostatische Aktivitäten in der Atmosphäre beobachtet und Auskunft über die Häufigkeit und Stärke von Blitzen gibt. Mir ging es dabei um große Reichweite, so dass Gewitter lange vor dem Erscheinen von Blitz und Donner am Ort erkannt werden. Außerdem wollte ich den Verlauf aufzeichnen, zum Beispiel um zu sehen, ob die Blitz-Aktivitäten zu- oder abnehmen.
Das Design ist einfach: Die elektromagnetischen Impulse von Blitzen werden mit dem AM-Radio-Chip TA7642 empfangen, verstärkt und mit dem ADC eines ATmega ausgewertet. Der ADC erfasst für jeden registrierten Blitz den maximalen Pegel. Der Mikrocontroller summiert die Maxima und berechnet die Summe pro Minute. Ein graphisches LC-Display (GLCD) zeigt den Verlauf, und mit einer Leuchtdiode wird ein Warnlevel angezeigt.
Die Schaltung
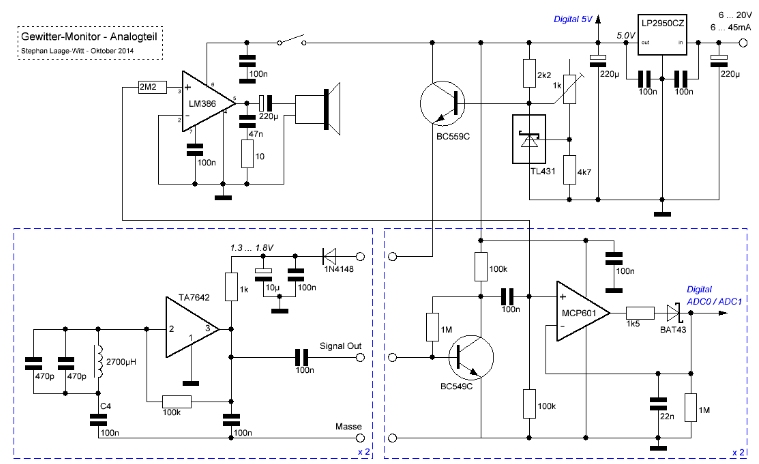
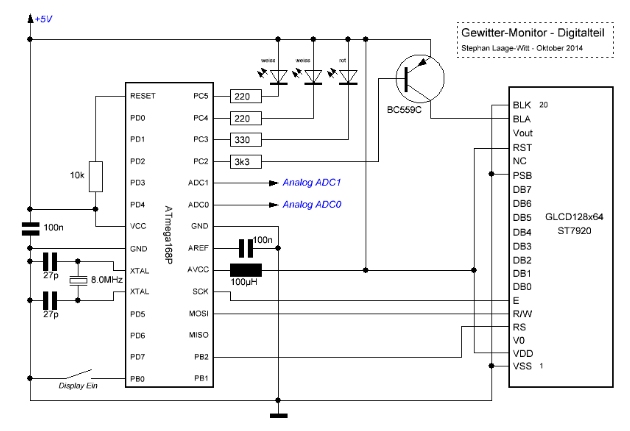
Das Gerät besteht aus zwei Komponenten, dem Analogteil um den AM-Empfänger 7642, und dem Digitalteil basierend auf einem ATmega16.
Analogteil: Das Signal der Blitze erreicht die Schaltung über die Antennen. Ich habe die Eingangsschaltung vom Franzis-Gewitterwarner mit dem AM-Empfänger TA7642 und nachgeschaltetem Transistor weitgehend übernommen. Allerdings wollte ich die Empfangsfrequenz so tief wie möglich legen, um näher an das Frequenzmaximum von Gewitterblitzen zu kommen. Der Antennenschwingkreis besteht aus einer Spule von 10 cm Länge auf einem Ferritstab, 0.3 mm Kupferdraht, und zwei parallel-geschalteten 470 pF Kondensatoren. Die Resonanzfrequenz liegt ungefähr bei 100 kHz. Das ist so ziemlich am unteren Rand des Frequenzbereiches, den der TA7642 noch sinnvoll verstärkt (siehe „Frequenzgang des TA7642“, Elektronik-Labor). Aber es reicht noch aus für gute Empfindlichkeit.
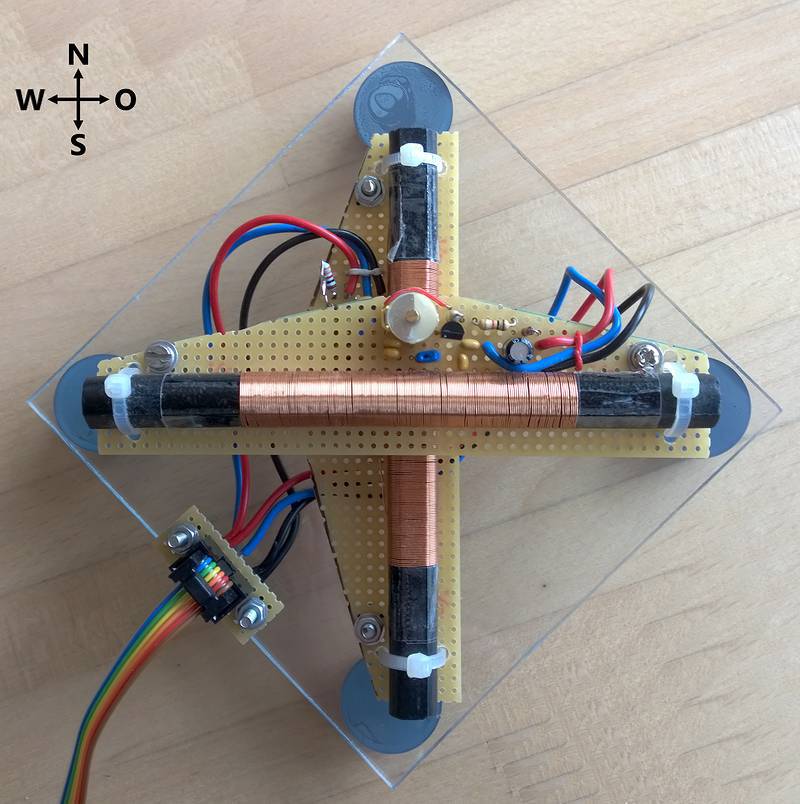
Ferritantennen haben eine Richtwirkung. Deshalb kommen zwei Analog-Teile mit jeweils einer eigenen Antenne zum Einsatz. Die Antennen sind rechtwinklig zu einander und horizontal montiert sind. Die horizontale Anordnung bewirkt, dass die häufigeren Wolke-zu-Wolke Blitze erfasst werden. Die bereits zitierten Meteorologen sagen, dass im Durchschnitt 60% der Blitze zwischen den Wolken stattfinden, also horizontal orientiert sind, während die verbleibenden 40% zwischen Wolke und Erde verlaufen. Der eine Ferritstab hat seine höchste Empfindlichkeit in Nord-Süd-Richtung, der andere in Ost-West-Richtung. Die Richtungsinformation, die sich daraus ergibt, lässt sich allerdings kaum verwerten, da die Maxima der Ferritantennen sehr breit sind. Das Digital-Teil berechnet die Summe über beide Kanäle.
Antennen über Kreuz: Hier werden alle Himmelsrichtungen erfasst. Die Ferritstäbe sind zusammen mit den TA7642 auf eigenen Platinen montiert. Betriebsspannung und Ausgangssignale werden über ein kurzes Flachbandkabel an das Gerät angekoppelt.
Die Spannungsversorgung der beiden TA7642 stellt gleichzeitig die Empfangsempfindlichkeit ein. Ich verwende eine Konstantspannungsquelle mit einer Bandgap-Referenz TL431, die als einstellbare Zenerdiode fungiert. Mit einem Trimmer lässt sich die Spannung und damit die grundsätzliche Empfindlichkeit der Antennen einstellen. Ich habe mit Spannungswerten zwischen 1.5 und 1.6 Volt am 1 kOhm-Widerstand vor dem Empfänger-IC (siehe Schaltung) die besten Erfahrungen gesammelt.
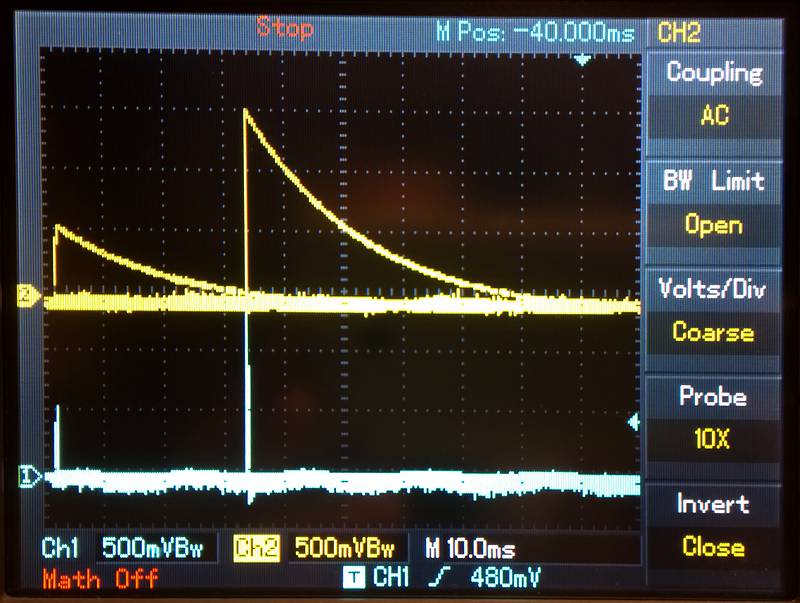
Blitze sind seltene und sehr kurze Ereignisse. Um sie zuverlässig mit dem ADC zu erfassen, müsste man den ADC mit einer hohen Abtastfrequenz betreiben. Ich habe mich für einen anderen Weg entschieden und mit Hilfe des Operationsverstärkers MCP601 einen Maximalwerte-Speicher dazwischen geschaltet. Solche Peak-Detection-Schaltungen waren früher bei Audio-Aussteuerungsanzeigen, z.B. LED-Balken-Anzeigen, verbreitet. Der Ausgang des OpAmp lädt über eine Diode eine RC-Kombination (22 nF und 1 MOhm), die sich dann entsprechend ihrer Zeitkonstante wieder entlädt. Der Spannungswert steht damit ausreichend lange am ADC-Eingang zur Verfügung, so dass eine gemächliche ADC-Abtastrate von 250 Hz pro Kanal gut funktioniert. Da beide Antennen im Wechsel abgefragt werden, läuft der ADC mit 500 Hz, wobei er ständig zwischen den beiden Eingängen hin und her schaltet. Dieses Tempo ist gut verträgliches für einen ATmega ist. Bild 3 zeigt ein Oszilloskop-Bild am Eingang und Ausgang der Peak-Detection Schaltung.
Messung am Peak-Detektor: Kanal 1 (blau) zeigt das Eingangssignal am OpAmp mit zwei kurzen Blitz-Impulsen. Kanal 2 (gelb) zeigt das langsam abfallende Ausgangssignal. In jedes 10 mS Intervall fallen im Schnitt 2.5 ADC-Wandlungen pro Kanal.
Schließlich enthält der Analogteil noch einen kleinen Audioverstärker, den man als akustischen Monitor zuschalten kann. Das ist zum Beispiel sehr nützlich, um einen geeigneten Aufstellungsort mit geringen Störsignalen zu finden.
Schaltung des Analogteils
Digitalteil: Der Digitalteil ist um den bewährten Atmega168 herum aufgebaut. Der Mikrocontroller wird mit einem 8 MHz-Quarz getaktet. Für den Betrieb der graphischen Anzeige ist eine ganze Menge Festkomma-Arithmetik notwendig, die zum Teil zeitkritisch ist. Deshalb ist die Taktrate von 8 MHz durchaus angemessen.
Die Ausgangsspannungen vom Analogteil erreichen den Mikrocontroller an den Eingängen ADC0 und ADC1. Der ADC wird so konfiguriert, dass er die interne Spannungsreferenz von 1.1V verwendet. Dieser Spannungslevel passt sehr gut zu den Ausgängen der OpAmps und kann ohne weitere Anpassung direkt verwendet werden.
Zwei weiße Leuchtdioden an Port C4 und C5 blinken kurz auf, wenn ein Blitz registriert wird. Die Software verwendet zwei Warnstufen, die durch die Blitzaktivitäten pro Minute ausgelöst werden. In der ersten Warnstufe schaltet Port C2 über einen PNP-Transistor die Hintergrund-Beleuchtung ein. Die Idee ist, dass das Gerät im Alltag ständig läuft und beim Aufziehen von Gewittern selbstständig das Display hell schaltet. Dann weiß man, dass etwas im Busche ist. Wenn die zweite Warnstufe erreicht ist, wird zusätzlich die rote Leuchtdiode an Port C3 aktiviert. Jetzt ist ein Gewitter sehr nah oder vielleicht auch schon direkt am Ort. Für neugierige Zeitgenossen – wie ich einer bin – gibt es eine Taste an Port B0, der die Hintergrundbeleuchtung manuell für 30 Sekunden aktiviert. Dann kann man registrierten Blitzaktivitäten sehen, auch wenn noch keine Warnstufe erreicht wurde.
Schaltung des Digitalteils
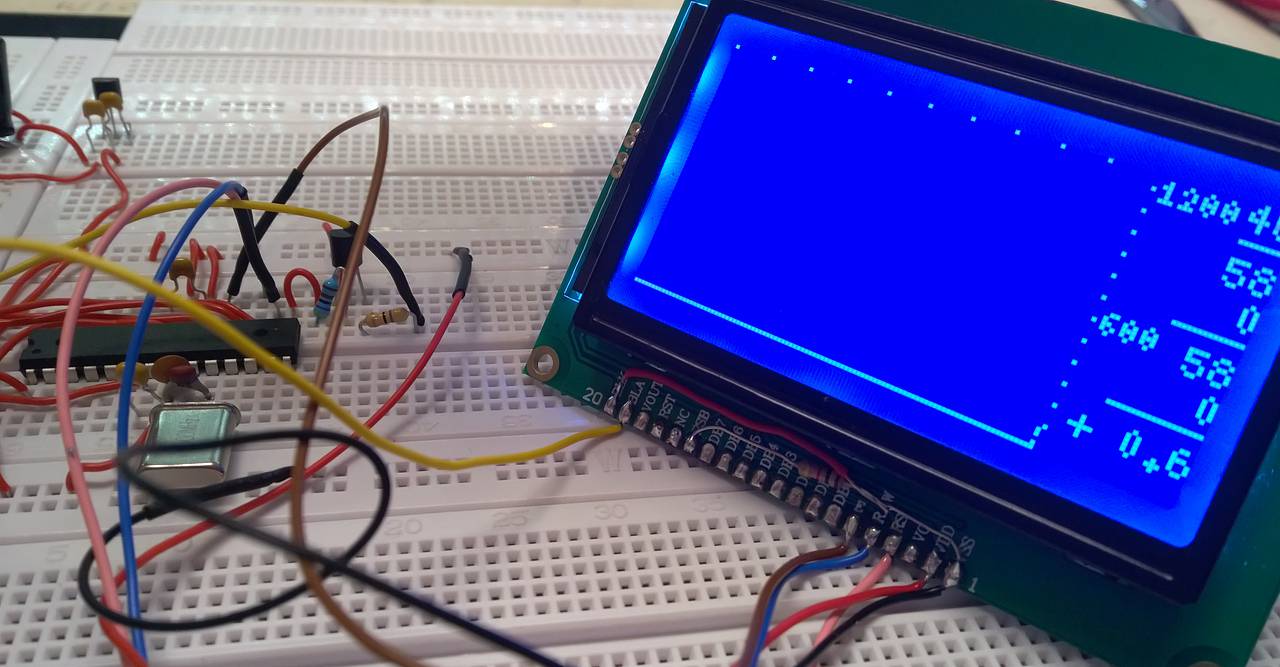
Graphik-Display: Das graphische LC-Display von Sitronix war ein günstiger Kauf im Internet und lag schon eine ganze Weile auf meinem Arbeitstisch in Erwartung von interessanten Aufgaben. Seit einiger Zeit werden diese Displays mit einer Auflösung von 128 x 64 Pixeln für wenig Geld angeboten. Für mich war es das erste Projekt mit diesem Displaytyp, und es geht erstaunlich einfach. Der Display-Controller ST7920 hat die angenehme Eigenschaft, ein paralleles und ein serielles Interface mitzubringen (siehe GLCD Datenblatt). Wenn der Anschluss PSB auf Masse liegt, wird das Interface auf serielles SPI geschaltet. Dann sind nur 3 Leitungen zur Signalübertragung erforderlich. Zusammen mit den Stromversorgungen für Display und Hintergrundbeleuchtung kann man das Display mit nur 6 Leitungen am Mikrocontroller betreiben. Einfacher geht es nicht!
Die andere nützliche Eigenschaft des Displays ist, dass es dazu eine fix- und fertige Software-Bibliothek in C gibt, u8glib, die eine umfangreiche Sammlung von Treibern und Graphik-Primitiven anbietet (siehe U8glib). In meinem Programm kommen die Funktionen DrawPixel, DrawLine, und DrawString zum Einsatz. Tatsächlich funktionierte alles auf Anhieb. Ein Dank an die Macher dieser vielseitigen Bibliothek!
Das Graphik-Display mit SPI-Interface benötigt nur 6 Leitungen zum Controller.
Die Software wurde in C entwickelt und wird direkt mit einem AVR-Programmer in den Flash-Speicher des Mikrocontroller geschrieben. Kernstück des Programms ist der regelmäßige Timer-Interrupt, der die Interrupt-Routine mit einer Frequenz von 500 Hz abarbeitet. Dort werden abwechselnd die beiden Antennensignale über die ADC-Kanäle eingelesen. Ein einfacher Software-Flankendetektor sucht nach Sprüngen zwischen zwei Werten, die einen Grenzwert (hier 150) übersteigen. Wenn ein solcher Sprung gefunden ist, sucht die Routine das Maximum des Blitzes und meldet an das Hauptprogramm, dass es etwas zu tun gibt. Das Hauptprogramm zeigt den gefundenen Maximalwert im Display auf der rechten Seite an. Außerdem berechnet es die Summe der Maxima pro Minute und produziert die Balkengraphik mit einer senkrechten Pixelreihe pro Minute. Das Display bietet Platz für die Aufzeichnung von 100 Minuten, wobei die alten Werte im Minutenrhythmus nach links geschoben werden. Schließlich wir einmal pro Minute eine lineare Regression der letzten 30 Minuten berechnet. Die resultierende Steigung wird unten rechts im Display angezeigt und ist eine Trendanalyse, ein Maß, ob der Pegel der Blitze in den letzten 30 Minuten angestiegen (= positive Werte) oder abgefallen (= negative Werte) ist. Allerdings ist der praktische Nutzen dieser Trendanalyse noch nicht recht überzeugend. Da gibt es noch Raum für Experimente.
Die Skalierung muss noch erklärt werden: Der ADC liefert Blitz-Maxima mit Werten zwischen 150 und 1024. Diese Werte werden auf 15 bis 100 skaliert. Der Wert 100 heißt also, dass ein Blitz den ADC maximal ausgesteuert hat. Die Werte werden pro Minute summiert. Eine Minuten-Summe von 500 zum Beispiel bedeutet, dass 5 maximal-starke Blitze registriert wurden, oder entsprechend eine größere Zahl schwächerer Blitze . Die Skala der Y-Achse reicht im Normalfall 0 bis 600 mit Markierungen in 100er-Schritten.
Wie beschrieben gibt es zwei Warnstufen: Wenn eine Minutensumme von 250 oder mehr erreicht wird, schaltet sich das Display automatisch ein. In der Regel ist dann von einem Gewitter noch lange nichts zu sehen oder zu hören. Die Signale kommen (noch) aus großer Entfernung. Wenn die Minutensumme 500 übersteigt, dann wird zusätzlich die rote Leuchtdiode aktiviert. Außerdem wird die Skala der Graphik auf einen Bereich von 0 bis 1200 umgeschaltet. Bei diesen Pegelwerten ist das Gewitter schon näher, zum Beispiel mit Wetterleuchten in der Ferne. Die Warnstufen werden nach 5 Minuten wieder zurückgesetzt.
Zum Testen von Hard- und Software braucht man nicht auf das nächste Gewitter zu warten. Ich habe mir mit einer weitgehend verbrauchten 9-Volt Block-Batterie einen „Blitz-Generator“ gebaut. Zwei etwa 10 cm lange Drahtstücke an die Batterieklemmen gelötet verwandeln die Batterie. Wenn man die blanken Drahtenden kurz miteinander in Kontakt bringt und das in 10 oder 20 cm Entfernung von den Antennen macht, dann sollte dieses Minigewitter Signale auf der Anzeige produzieren.
Praktische Erfahrungen
Ich habe das Gerät jetzt seit zwei Monaten in Betrieb und beobachte natürlich gespannt die Wetteraktivitäten. Der erste Eindruck: Die Empfindlichkeit ist enorm, besonders bei Nacht, wenn langwellige Radiosignale eine weite Ausbreitung haben. Wir hatten einige Nächte mit heftigen Gewittern in Südfrankreich oder Italien, immerhin 600 km oder mehr von meinem Wohnort entfernt. Ich konnte die Gewitteraktivitäten mit Signalpegeln von 200 oder 300 pro Minute gut beobachten. Im August und September gab es kaum eine Nacht ohne empfangene Gewittersignale. Erst im Oktober wurde es ruhiger und brachte dann auch Tage und Nächte ganz ohne Aktivitäten auf der Anzeige.
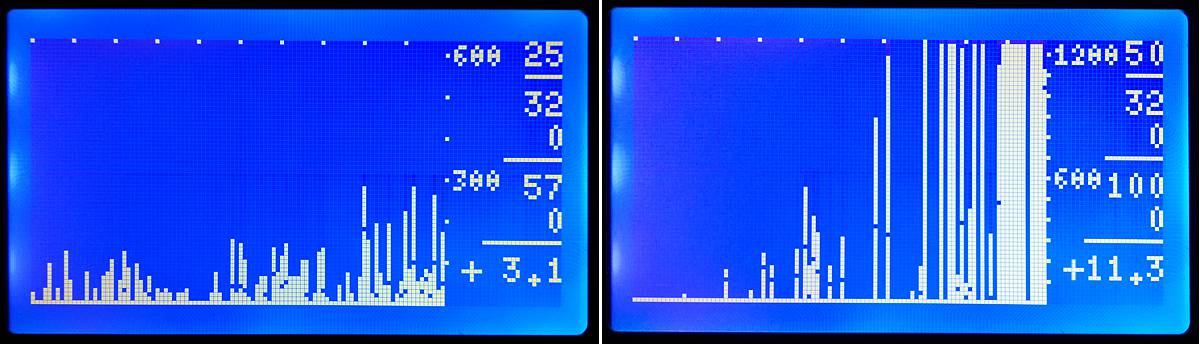
Der Durchzug eines Wetterwechsels kündigt sich fast immer mit Gewitteraktivitäten an, die schon von weiter Entfernung als Signale auf der Anzeige erscheinen. Wenn ein Gewitter näher kommt und wir zum Beispiel am Abend auf der Terrasse Wetterleuchten beobachten können, dann zeigt das Gerät Pegel von 500 und mehr pro Minute. Wenn Gewittergrollen zu hören und ein Gewitter in direkter Nähe ist, dann ist das Gerät vollständig aus- und zum Teil auch übersteuert. Es werden durchgängig Maximalwerte angezeigt. Die folgenden Bilder zeigen, wie die Anzeige funktioniert und einige Beispiele.
Viel Information auf kleinem Raum: So sieht die Anzeige an einem gewittrigen Abend aus. Die Gewitterfront ist mehrere hundert km weit weg, kommt aber stetig näher.Im linken Bild ist eine Gewitterzelle in der Ferne vorbeigezogen, ohne wirklich näher zu kommen. Im rechten Bild hat sich innerhalb von 40 Minuten ein heftiges lokales Gewitter entwickelt. Die rote Leuchtdiode wurde gesetzt, und die Skala auf den größeren Bereich umgeschaltet.
Im Laufe der Zeit hat sich das Gerät als eine schöne Erweiterung zu den verbreiteten Wetterstationen etabliert und gibt bereitwillig Auskunft über die atmosphärischen Aktivitäten und die Wetterlage.
Von Zeit zu Zeit beschäftige ich mich mit nostalgischem Radiobasteln – zur Entspannung und einfach, weil es Freude macht. Oft ist der Weg von der ursprünglichen Idee bis zum fertigen Gerät länger als gedacht. Aber wenn ich mir die Zeit lasse, dann ist es immer ein vergnüglicher Weg, der viele neue Erkenntnisse bringt.
Nach verschiedenen Experimenten mit MW- und KW-Radios war es an der Zeit, mich an einem FM-Radio zu probieren, das den UKW-Bereich abdeckt. Von Philips gibt es eine Familie von Radio-Chips basierend auf dem TDA7000, die den Hochfrequenz-Aufbau sehr vereinfachen. Auch wenn dieses Chips inzwischen sehr in die Jahre gekommen sind, so bieten sie guten UKW-Empfang bei einfachem Aufbau. Und wenn ich schon dabei war, sollte es doch auch möglich sein, mit dem entsprechenden Stereo-Dekoder ein „richtig brauchbares“ Stereo-Radio zu bauen.
Dieses Projekt wurde angeregt durch Diskussionen und Ideen vom Elektronik-Labor von B. Kainka. Die Beschreibung des FM Stereo Radios wurde dort auch veröffentlicht.
Zielsetzung
Es sollte also ein praxistauglicher FM-Stereo-Empfänger werden. Und er sollte offen sein für neugierige Einblicke: Wie schon bei anderen Projekten wollte ich die Elektronik in einem Plexiglas-Gehäuse als freie Verdrahtung unterbringen. Bei dieser Bauweise kommt keine Platine zum Einsatz. Statt dessen wird die Schaltung so aufgebaut, dass die Bauteile über ihre Anschlussdrähte und Lötösen auf der durchsichtigen Grundplatte Halt finden. Das ist nun eigentlich gar nicht für Hochfrequenz geeignet. Aber zum Glück machen die Philips-Bausteine die Sache einfach, da die ICs die hohen Frequenzen weitgehend intern verarbeiten. Das sollte auch mit einem Drahtverhau funktionieren.
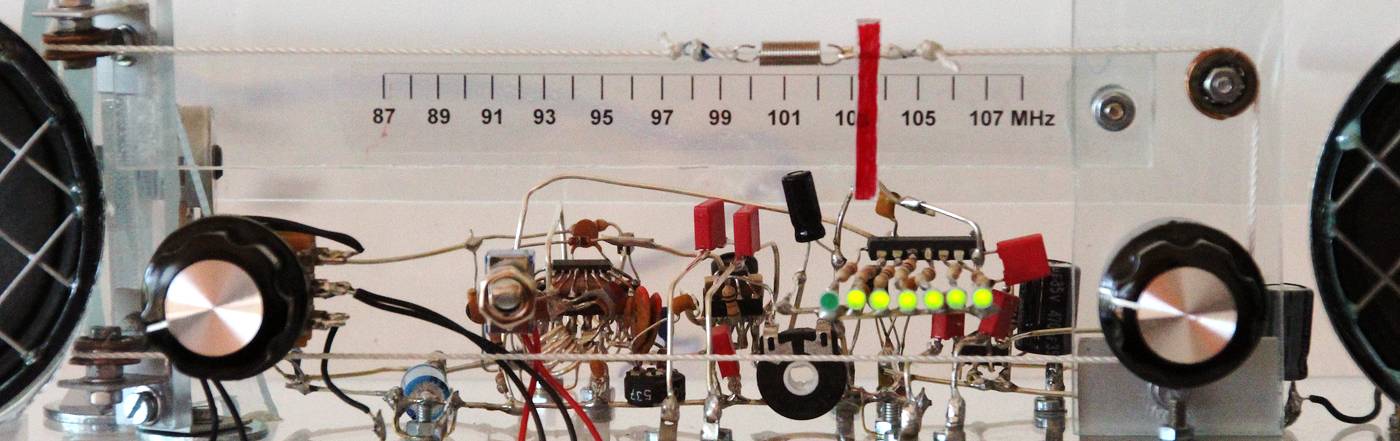
Die Bedienung für Senderwahl und Lautstärke sollte über Drehknöpfe erfolgen, so wie früher, als Elektronik noch nicht über Tipptasten oder Touchscreens kontrolliert wurde. Auch eine Frequenzskala mit beweglicher Markierung via Skalenseil wurde in das Pflichtenheft mit aufgenommen. Und schließlich sollte noch eine Leuchtbandanzeige (in Anlehnung an ein „magisches Auge“) die Empfangsstärke anzeigen und bei der Abstimmung Unterstützung leisten.
Schaltplan
Für die Schaltung kam der Empfänger TDA7021 zum Einsatz. Dieser Chip hat keine automatische Senderabstimmung, ist deshalb besser geeignet für eine manuelle Abstimmung mit Drehknopf. Außerdem stellt er an Pin 9 die Empfangs-Feldstärke als Spannungswert bereit. Als Stereo-Dekoder kam ein TDA7040 dazu, der sehr gut mit dem 7021 harmoniert.
Die Chips waren gar nicht so einfach zu bekommen. Aber es gibt nichts, das es im Internet nicht gibt. Ich wurde bei einem Internet-Auktionshaus fündig, so dass schließlich für wenige Euro ein kleiner Umschlag aus Hongkong mit den Philips-Bausteinen in meinem Briefkasten landete. Das ging ja einfacher, als ich gedacht hatte.
Schaltplan des FM Stereo Radios
Aber der Reihe nach. Die Schaltung wird über eine 9-Volt-Batterie versorgt, was gut für den NF-Verstärker aber deutlich zu viel für die TDA-Chips ist. Deshalb sorgt ein 78L03 für stabile 3 Volt auf der HF-Seite. Die Schaltung folgt fast vollständig der Anwendung, die im Philips-Datenblatt gezeigt ist. Der frequenzbestimmende Oszillatorkreis besteht aus einer Spule (Luftspule aus 4 Windungen, 5 mm Durchmesser, etwa 10 mm Länge) und einer Kapazitätsdiode 1SV101. Die Abstimmung erfolgt über ein lineares 47 k-Potentiometer. Mit dem Spannungsbereich von 0 bis 3 Volt lässt sich das UKW-Band sehr gut überstreichen. Die Widerstände links und rechts vom Abstimm-Poti begrenzen den Empfangsbereich auf das nutzbare Radioband. Als Antenne wird ein Drahtstück von 1 m Länge am Eingangskreise angeschlossen. Die Induktivität L3 in der Stromversorgung des TDA7021 ist übrigens in der Philips-Applikation nicht zu finden. Bei meinem Aufbau eliminierte sie Zwitschergeräusche, die andernfalls ab und zu zu hören waren.
Der Stereo-Dekoder übernimmt das MPX-Signal und liefert die Niederfrequenz an das Stereo-Poti zu Lautstärke-Einstellung.
Für die NF-Verstärkung konnte ich zwei LM386 zur Mitarbeit überreden, die sich in der Bastelkiste langweilten. Sie arbeiten hier mit niedriger Verstärkung und treiben zwei kleine Lautsprecher. Die Schaltung hat noch einige Elkos und 100 nF Blockkondensatoren zur Stabilisierung und Vermeidung von ungewollten Schwingungen.
Für die Feldstärke-Anzeige musste auch wieder die Bastelkiste herhalten. Die Messungen an Pin 9 des TDA7021 zeigten, dass ohne Sender etwa 2.7 Volt anlagen. Je stärker der Sender, desto geringer war die Spannung bis herunter auf minimal etwa 0.3 Volt. Das Signal hätte man mit Komparator, Inverter und LED-Treiber aufbereiten können. Ein Blick in meine Vorräte brachte mich aber auf eine andere Idee. Schon vor ein paar Wochen hatte ich einen Satz ATtiny44 bekommen, die auf eine Aufgabe warteten. Dieser AVR-Controller ist dem ATtiny13 sehr ähnlich, verfügt aber über wesentlich mehr Ausgänge. Das war ideal für meinen Zweck. Der ADC des Mikrocontrollers übernimmt den Spannungswert an PA7 und steuert die Leuchtdioden an PA0 bis PA6. Die Pegelanpassung wurde komplett per Software gemacht, was den Aufbau natürlich sehr vereinfachte. Die Anzahl von 7 LEDs erschien mir als guter Kompromiss zwischen Auflösung und Stromverbrauch. Tatsächlich arbeitetet die Anzeige mit einer Auflösung von 14 statt 7 Stufen. Bei allen ungeraden Werten wird die jeweils nächst höhere LED im Pulsweiten-Modus mit 25 % betrieben, was etwa die halbe Helligkeit ergibt. Dadurch erscheinen die Übergänge „weicher“, schon beinahe wie mit analoger Elektronik. Der Controller läuft mit dem internen 1 Mhz-Oszillator und hat nicht wirklich viel zu tun. Er darf deshalb den größten Teil der Zeit im Sleep-Modus entspannen.
Das Programm ist in C geschrieben und recht einfach. Die Details sind den Kommentaren im C-Programm zu entnehmen. Die Fuses am fabrikneuen Chip brauchen nicht verändert zu werden.
Experimente
Bevor ich mich an den Aufbau des Radios im Plexiglas-Gehäuse machen konnte, musste etwas Forschungsarbeit betrieben werden. Die erste Frage war: Wie bekomme ich SMD-Bausteine in eine frei-fliegende Verdrahtung? Ich habe einige Varianten probiert und bin dann mit der Montage auf einer IC-Fassung am Besten zurecht gekommen. Die SMD-Chips wurden mit einem kleine Stück Holz etwas erhöht auf die IC-Fassung geklebt und dann Pin für Pin verdrahtet. Ein spitzer Lötkolben, eine ruhige Hand (!) und eine kräftige Lesebrille machten es möglich. Die SMD-Chips mit 1,27 mm Pin-Abstand sind eigentlich recht gutmütig, und nach ein bisschen Übung geht das Löten zügig von der Hand. Die montierten ICs sind mechanisch sehr robust.
Montage des SMD-Chips auf einer IC-Fassung
Der nächste Schritt war ein Probe-Aufbau auf einem Holzbrett. Ich hatte verschiedene Varianten der Anordnung ausprobiert, um Leitungslängen klein zu halten. Als Draht kam versilberter Kupferdraht mit 1 mm Durchmesser zum Einsatz, der einerseits gute, mechanische Stabilität bietet und andererseits hübsch anzuschauen ist. Die Schaltung war erstaunlich unproblematisch und robust.
Probe-Aufbau auf einem Holzbrett
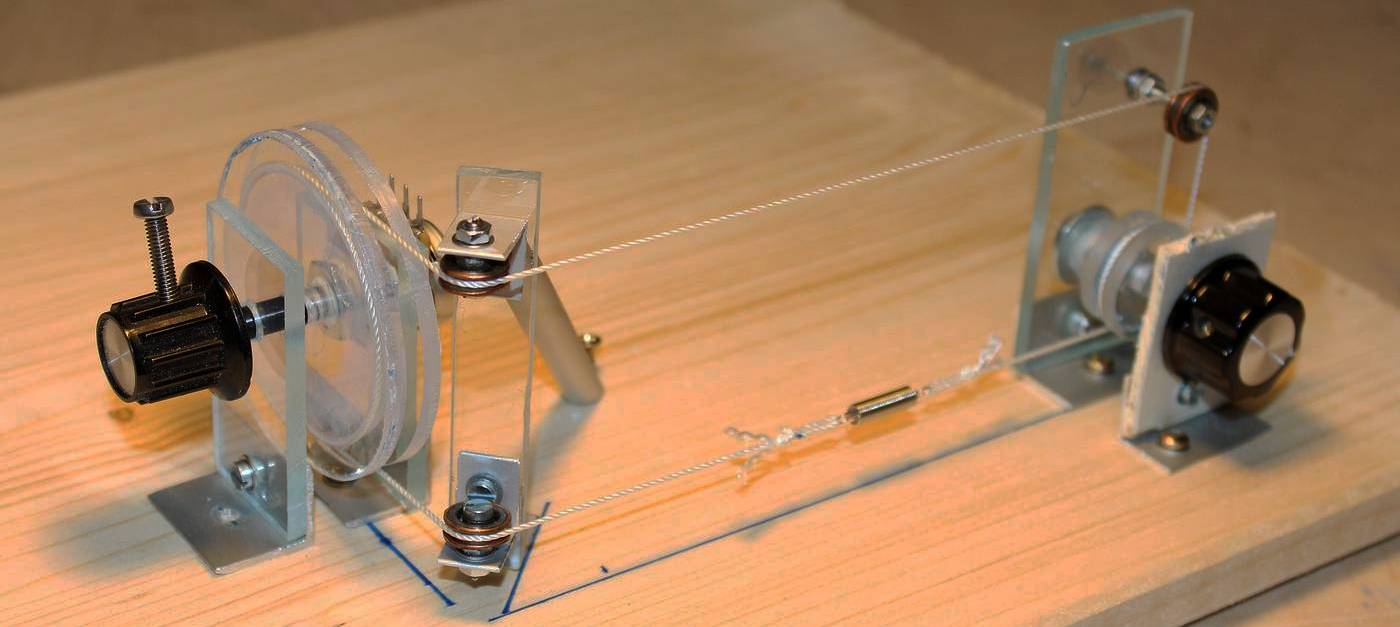
Das dritte Experiment beschäftigte sich mit dem Skalentrieb. Das Seilrad am Abstimmpoti sollte einen Durchmesser von 5 cm Durchmesser bekommen. Das ergab bei einem nutzbaren Drehwinkel von 270 Grad eine Skalenlänge von etwa 11 cm. Dadurch waren dann auch die Gehäusemasse definierte. Aus Platzgründen wurde das Abstimmpoti um 90 Grad verdreht angeordnet. Das Seil ließ sich gut über Umlenkrollen führen. Als Gegenstück arbeitete ein kleines Seilrad mit 2 cm Durchmesser, das auf einer freien Achse (eine M6-Schraube) mit Drehknopf montiert war. Die Abstimmung hat also eine Untersetzung von 2 auf 5, ein guter Wert für feinfühligen Abstimmen. Das Seil kam übrigens von einer Nylon-Drachenschnur. Es wurde mit einer kleiner Feder gespannt.
Testaufbau des Skalen-Antriebs
Finaler Aufbau
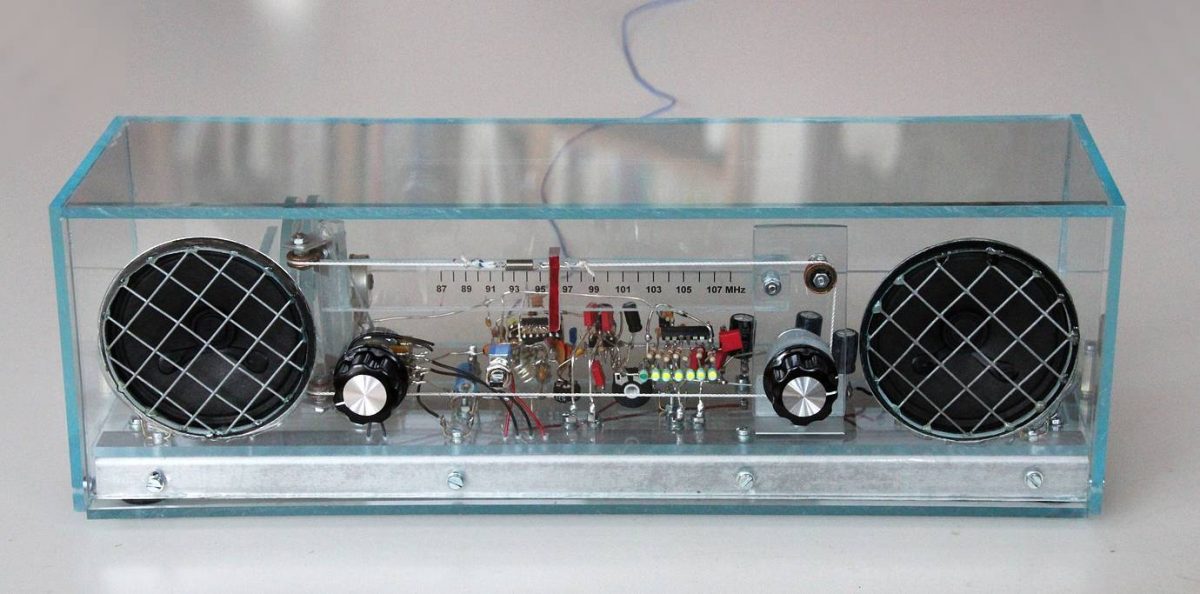
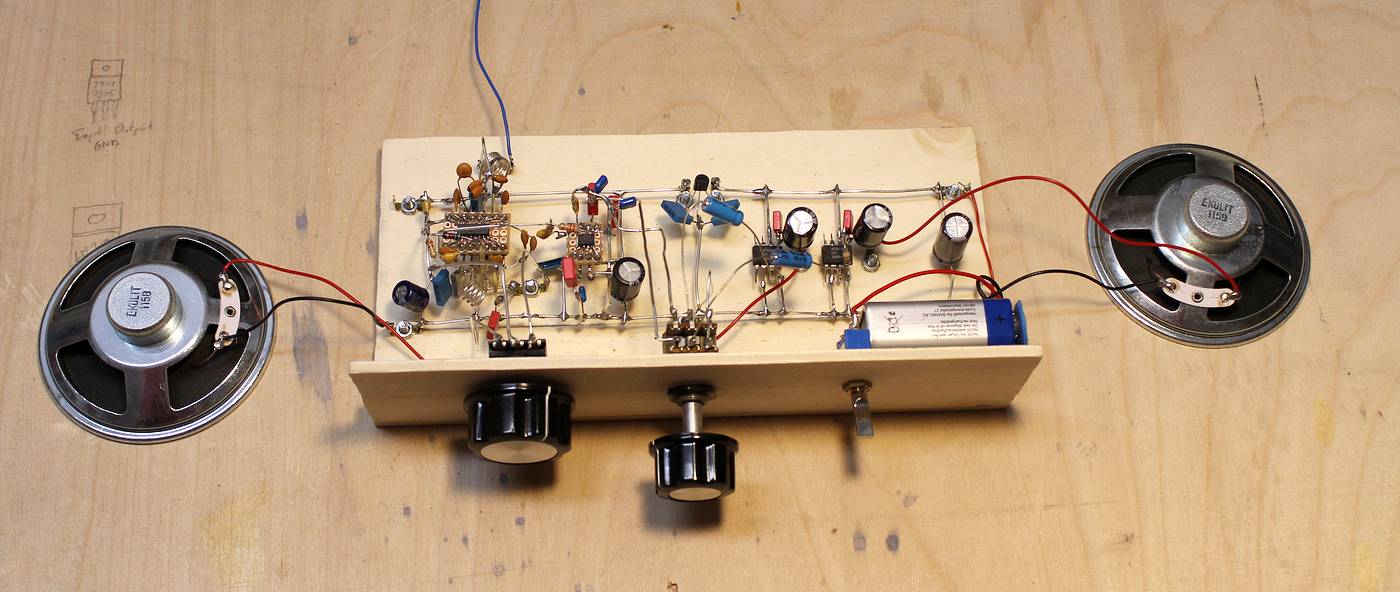
Nachdem die Forschung erfolgreich abgeschlossen war, konnte es an den Zusammenbau gehen. Für das Gehäuse kamen Plexiglas und Aluminium zum Einsatz. Die Plexiglasplatten sind leider sehr empfindlich, wenn die Schutzfolie erst einmal entfernt ist. Deshalb hatte ich die Schaltung komplett auf einem Holzbrett aufgebaut und erst dann auf die fertig bearbeitete und gebohrte Plexiglasplatte transferiert. Die aufgebaute Schaltung war auch ohne Grundplatte einigermaßen stabil, so dass sie sich gut an ihren Arbeitsplatz transferieren ließ.
Die fertige Schaltung an ihrem Arbeitsplatz
Der Abgleich war sehr einfach. Erster Punkt war das Auseinanderziehen oder Zusammendrücken der Oszillatorspule, bis der Frequenzbereich mit dem UKW-Band übereinstimmte. Das brauchte ein bisschen Geduld und Fingerspitzengefühl.
Zum Abgleich von P2 und P3 schweigt sich das Philips-Datenblatt leider aus. In der Praxis sind die Einstellungen aber unproblematisch. Das Radio läuft prima mit P2 und P3 ungefähr in Mittelstellung. Kollege Google hat ausführlichere Tipps, wenn ein Oszilloskop oder Frequenzzähler zur Verfügung stehen:
1
2
3
P3 istfürden PLL-Oszillator des Stereo-Dekoders zuständig.Zum Abgleich wird die Abstimmung ineinen Bereich ohne Sender gedreht,so dass der Oszillator freiläuft.Jetzt den100nF-Kondensator an Pin7des TDA7040lösen und Pin7über einen10kOhm-Widerstand an die Spannungsversorgung(3V)legen.Mit einem Oszilloskop oder Frequenzzähler die Frequenz des Oszillators abnehmen undmöglichst exakt auf19kHz eingestellt.Damit hat der Oszillator die optimalen Voraussetzungen,auf das Pilot-Signal eines Senders einzurasten.Zum Schluss den Umbaurückgängig machen.
P2 an Pin15des TDA7021 wird so eingestellt,dass auch ein schwacher Sender mit deutlich erkennbarem Stereo-Soundübertragen wurde.
Zum Schluss kam noch, sozusagen als i-Tüpfelchen, die Frequenzskala. Um die Positionen der Frequenzen zu finden, habe ich mit Hilfe meines Reiseempfänger die Frequenzen des Oszillators am TDA7021 ermittelt. Das klappt prima, weil die Zwischenfrequenz mit 70 kHz quasi vernachlässigbar ist. Den Empfänger stellte ich mit eingeschobener Antenne direkt neben mein Radio. Die gesuchte Frequenz wurde am Reiseempfänger eingestellt, z.B. 90 MHz. Jetzt war der Oszillator beim Durchdrehen der Abstimmung einwandfrei im Reiseempfänger zu finden, so dass ich die 90 MHz-Position auf der Skala übernehmen konnte. Das wurde schrittweise für mehrere Frequenzen wiederholt, bis die Skala komplett war. Die Skala habe ich dann auf transparente Folie gedruckt und mit Tesafilm auf den durchsichtigen Skalenträger montiert. So, fertig.
Skala mit Zeiger
Empfangspraxis
Und dann war es soweit: Das Radio konnte vorgeführt und ausprobiert werden. Die Empfindlichkeit hat mich von Anfang an überrascht. Der TDA7021 kommt auch mit schwachen Sender gut zurecht und ist sicherlich mit dem UKW-Band meines Reiseempfängers auf Augenhöhe. Beim Durchdrehen des Abstimmknopfes erscheinen die Sender dicht gepackt auf der Skala. Die LED-Anzeige ist flink und beim Abstimmen hilfreich. Es kommen schnell Assoziationen an Omas Röhrenradio mit Skala und magischem Auge. Auch die Klangqualität ist gut; und der Stereo-Effekt ist durch den relativ großen Abstand der beiden Lautsprecher im breiten Gehäuse schön zu hören. Der Empfang ist absolut klar, zumindest solange die Sender mit ausreichender Feldstärke hereinkommen. Wenn der Empfang schwächer ist (3 oder 4 LEDs), dann sind die Sender von ausgeprägtem Stereo-Rauschen begleitet. Aber das kann man der kleinen Schaltung nicht übel nehmen.
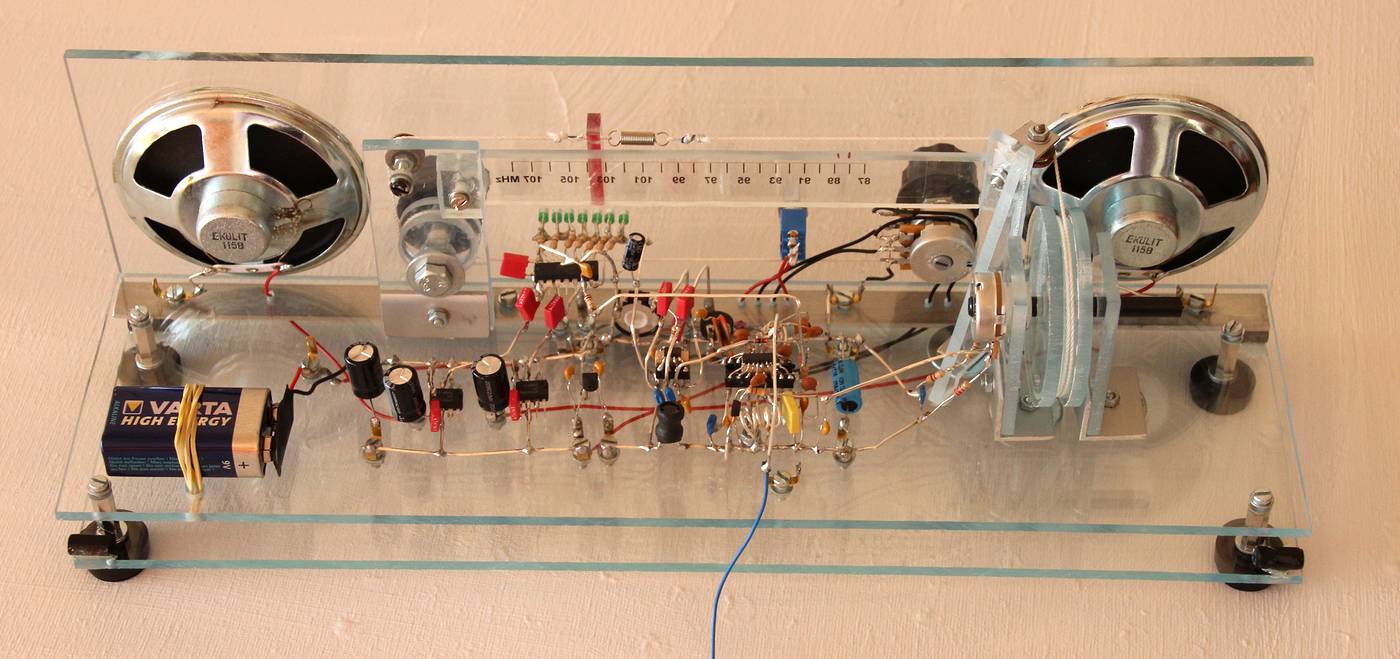
Detailansicht der frei-schwebenden Verdrahtung
Das Radio steht nun schon seit ein paar Wochen in der Küche. Wir benutzen es oft und gerne und möchten es nicht mehr missen. Und das gut einsehbare Innenleben beschert interessante Einblicke, die auch oft Besucher in ihren Bann ziehen.
Bei diesem Projekt geht es um Kunst. Langsam zieht eine Kugel durch den Sand und hinterlässt eine Spur, die nach und nach ein Bild ergibt. Nach ein oder zwei Stunde ist die Zeichnung fertig. Aber Sandbilder sind vergänglich. Die scharfen Kanten verschwinden, und das Bild verblasst im Laufe von Tagen und Wochen.
Mathematische Schwingungen erzeugen ein Bild im Sand
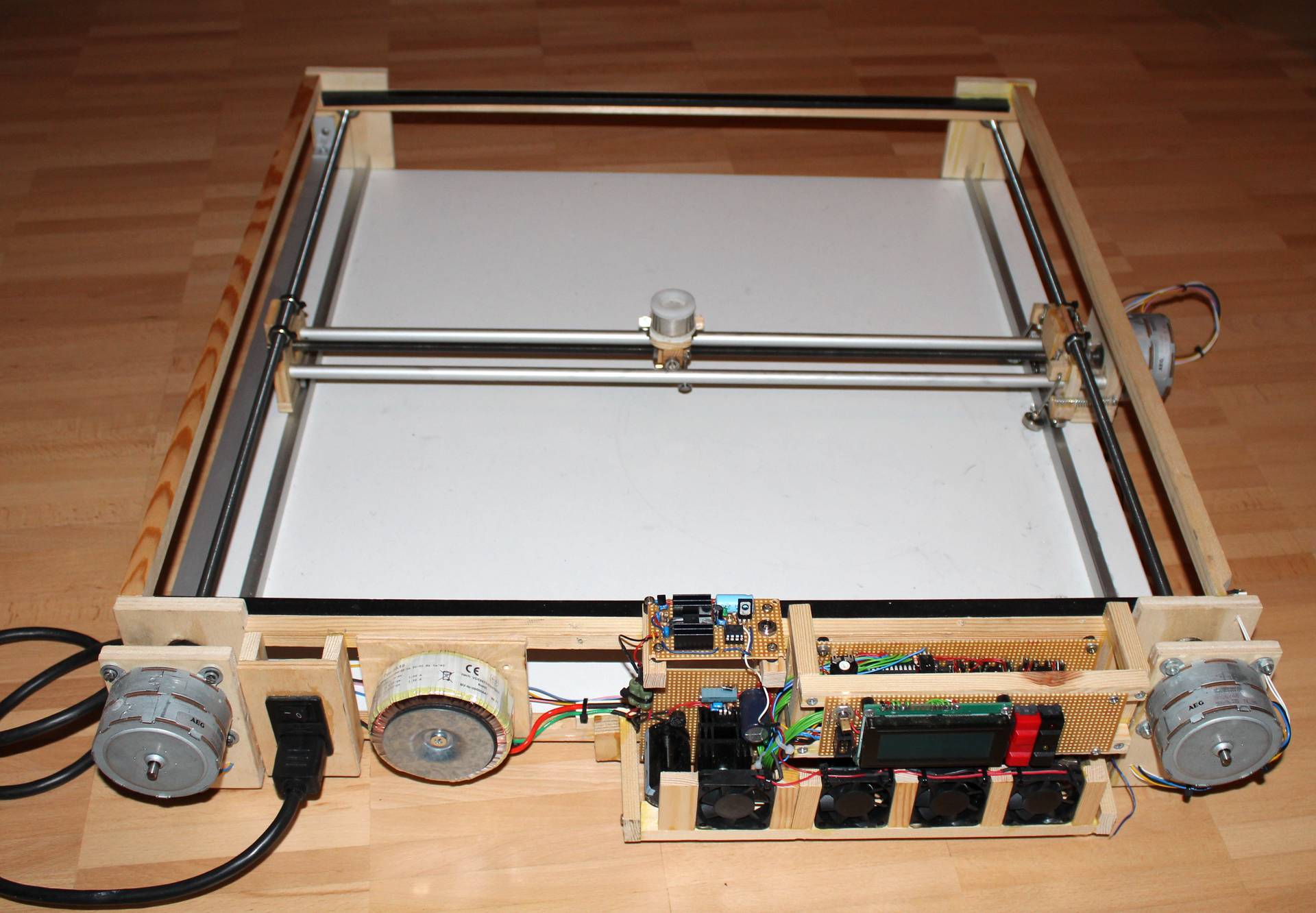
Die technische Ausführung basiert auf einer X/Y-Steuerung mit Schrittmotoren und Gewindestangen, die einen Magneten unter der Holzplatte bewegt und so eine eiserne Kugel durch den Sand zieht.
Unter der Platte mit dem Sand befinden sich Elektronik und Mechanik
Bei diesem Projekt kommen zwei ATmega zum Einsatz. Der erste Prozessor erzeugt die mathematischen Koordinaten des Bildes und ist über Display und Tastatur erreichbar. Der zweite Prozessor übernimmt die Koordinaten und steuert mit Hilfe von Leistungstransistoren die Spulen der Schrittmotoren. Außerdem ist noch ein ATtiny beteiligt, der die Helligkeit der LEDs regelt.
Elektronik des Sanplotters
Die Schrittmotoren und ihre steuernden Transistoren müssen kräftige Ströme verarbeiten. Deshalb gibt es eine aktive Kühlung mit kleinen Ventilatoren.
Mit der Zeit entstehen verschiedene Programme, die mathematische Muster und Verläufe produzieren und über die Tastatur abgerufen werden können.